



3Dセンサーとは|各種計測手法と使用用途を解説
3Dセンサーとは対象物の3次元形状を計測するセンシング機器のことです。
一般的なカメラ(2Dセンサー)は2次元の明暗情報を取得します。一方、3Dセンサーは2次元データに加えて高さデータが取得できます。
本記事では、非接触3Dセンサーの種類を計測手法別に解説。また、3Dセンサーの用途と具体的な製品例もまとめます。
1.3Dセンサーの種類
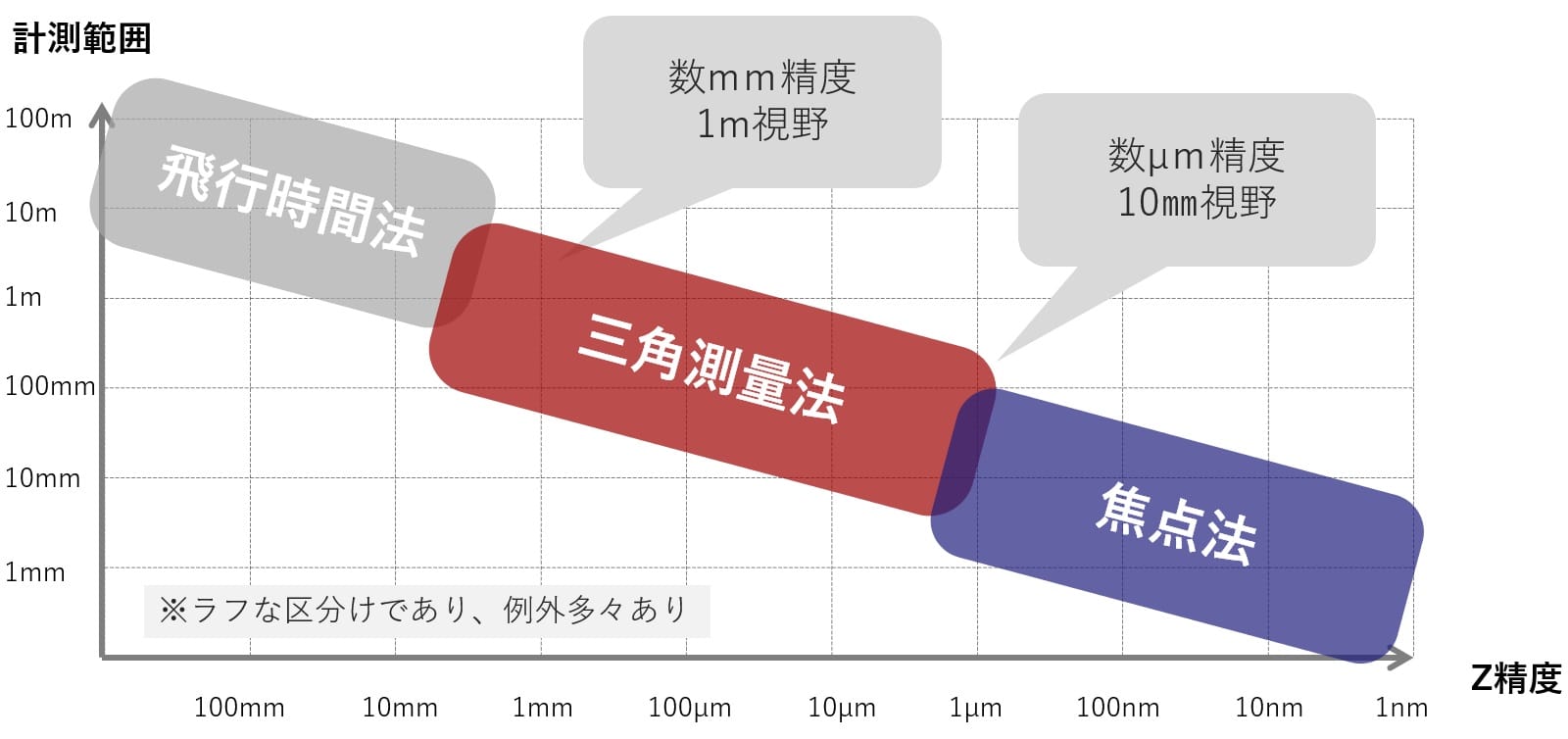
3Dセンサーは、計測手法によってさまざまな種類があります。
非接触3Dセンサーに使われるセンシング技術は「時間遅延法」「三角測量法」「焦点法」の3つです。
時間遅延法
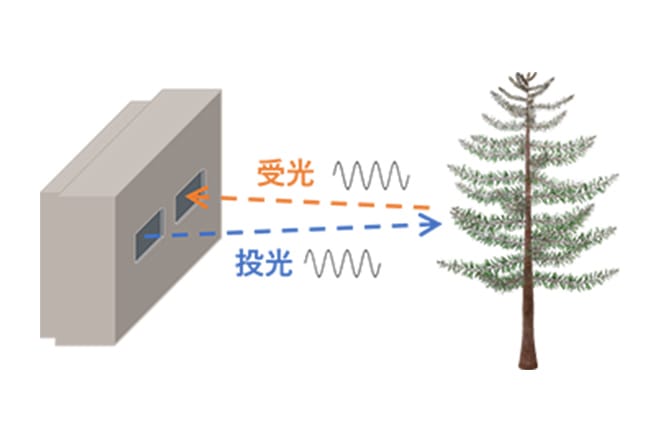
時間遅延法を利用した3Dセンサーでは、対象物に光を照射してセンサーに帰るまでの時間から距離を計測します。
最長で100mを超える奥行の計測が可能です。計測精度は近距離の場合でも数mm程度です。
LiDAR
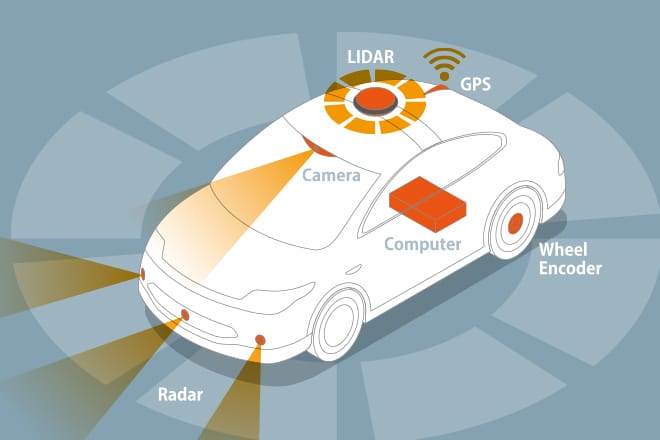
LiDAR(ライダー)とは、「light detection and ranging(光による検知と測距)」の頭文字をとった言葉で、照射したレーザー光の反射光や散乱光を検出することで、対象物までの距離や形状を測定する手法です。
照射したレーザー光が物体に当たって跳ね返ってくるまでの時間を計測し、物体までの距離や方向を測定します。
LiDARは、対象物はもちろん、位置や形状まで正確に測れることが特徴です。
自動車の自動運転には必要不可欠な技術になっています。
TOF(Time-of-Flight)
LiDARのうち、パルス波を一定間隔で投光するものがTOFセンサーです。
カメラと組み合わせたTOFカメラとしての利用が多く、人の行動監視などに使われます。
一度の光照射で広い視野範囲の情報を取得できるのが特徴です。比較的低コストで利用できます。
三角測量法
三角測量法を利用した3Dセンサーでは、カメラと光源など2つのデバイスの位置関係から3次元的な距離を計測します。
例えば位置関係が既知のカメラと光源があり、測定ポイントに対する角度を求めることで対象物までの距離を取得します。
3Dセンサーの精度は2つのデバイス間の距離と、対象物を見るカメラの分解能に依存します。
高倍率の光学系を用いることで、μmレベルの計測も可能です。
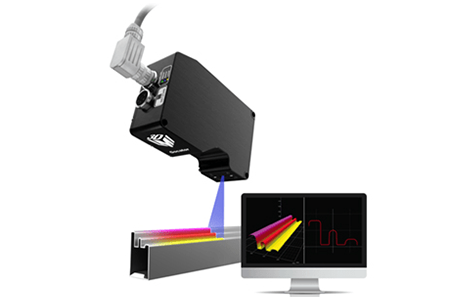
光切断法
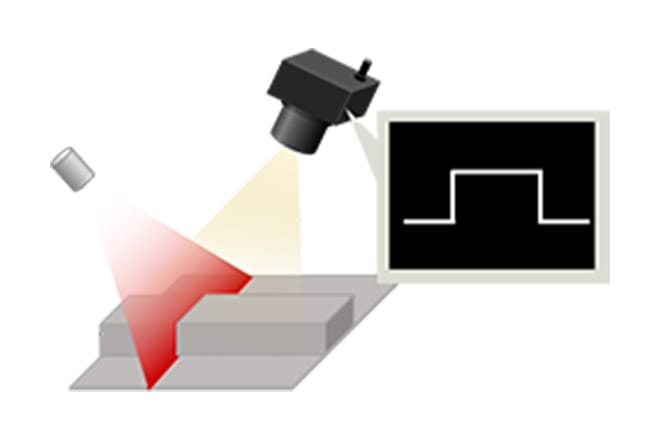
光切断法は、ライン状のレーザー光を対象物に照射し、その反射光をカメラで捉え、
カメラ画像に映るレーザーラインの変位から対象物の高さを計測する方法です。
1回のスキャンで1プロファイル(断面)分のデータが取得できるラインスキャンタイプのセンサーです。
3Dセンサーまたは対象物を移動しながらスキャンし、
取得したプロファイルデータを連続的に結合することで、3次元形状を生成します。
光切断法はカメラに映るレーザーラインの高さを算出するというシンプルな計測手法ですが、高精度かつ確実性の高い手法です。
細いレーザーラインを照射する光学系機器やカメラ性能の向上により、μmレベルの高さ計測も可能となりました。
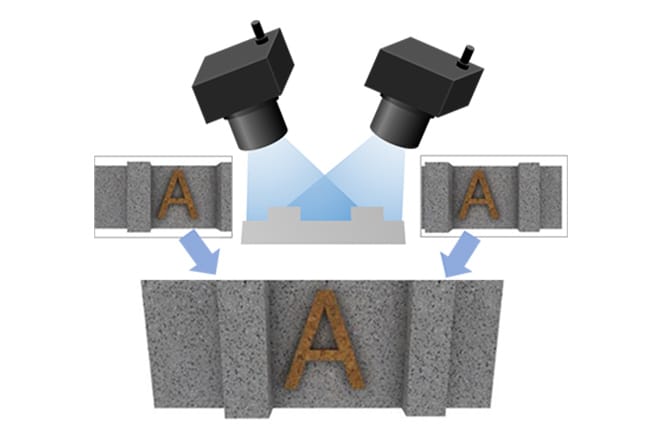
ステレオビジョン
ステレオビジョンは、2台以上のカメラで対象物の同じ位置を捉え、その視差から高さの違いを算出します。
エリアカメラ1ショットで3次元形状が撮影でき、速度・コスト的に有利な手法です。
安価な可視光カメラを用いて得られた画像から、複数の立体物の大きさ、距離、位置、速度等を
瞬時に検出することができます。
撮影画像内の特徴点同士の視差を比較するため、高低差がテクスチャとなって映る必要があります。
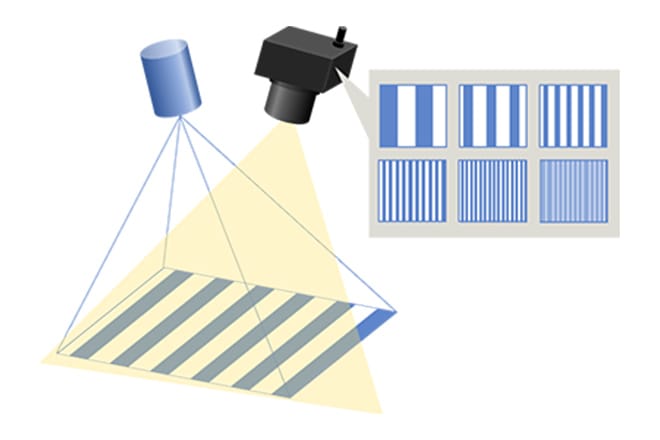
縞投影法/パターン投影法
パターン投影法はレーザーやLED光で対象物にパターンを投影し、
物体の表面に反射するパターンを別の角度からカメラで観測することによって、3次元形状を計測する方法です。
縞模様パターンを使用するケースが多く縞投影法とも呼ばれます。
縞投影法では縞の太さが異なる複数の縞パターンを投影し、カメラで撮影します。
対象物が平面の場合は直線的な縞模様が撮影されますが、
カメラは斜め上から撮影するため、対象物に凹凸があると縞模様が湾曲したり途切れて撮影されます。
複数撮影した縞パターンの情報を組み合わせることで、光が反射した面の高さを算出することができます。
縞投影法は静止状態で高精度な3次元形状を撮像できます。
焦点法
焦点法は、3Dセンサーと対象物の距離を変えながら複数枚画像を撮像し、ピントの合った位置から高さを算出します。
「ピントが合った位置」を判断する方法によって手法が異なり、精度が決まります。
計測手法によってはnmレベルの高さが計測できます。
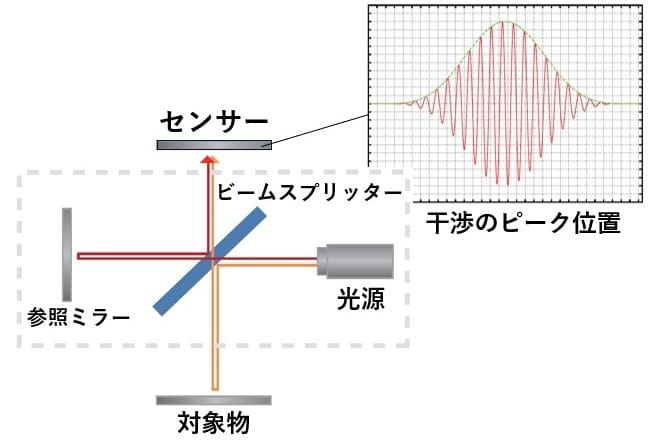
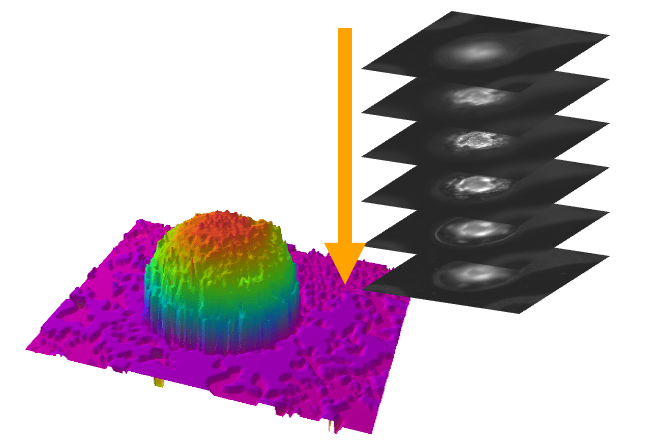
白色干渉方式
白色干渉方式は、複数の波長をもつ白色光を2方向から照射した際、
その光路長が完全に同じ場合に光が強く干渉するという特性を利用した計測手法です。
白色光をビームスプリッタによって2分割し、一方を対象物に、もう一方を参照ミラーに反射させて、
センサーが受光します。
受光した光同士の干渉強度が最も強くなった距離から対象物表面までの高さを測定します。
光の波長のオーダーでフォーカス位置を算出できるため、nmレベルの高さが計測できます。
また対象物の材質・色を問わず計測できるのも特徴です。
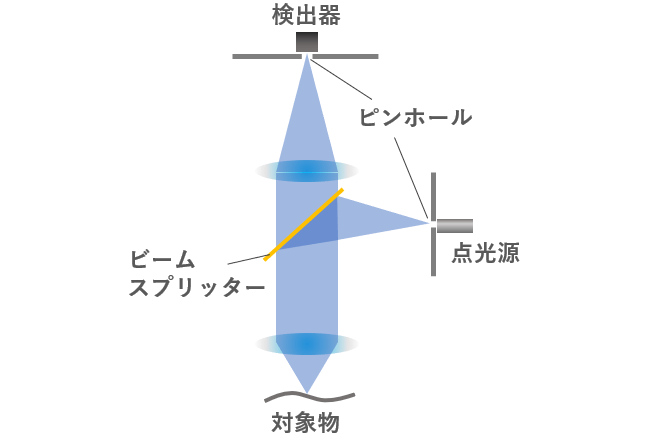
共焦点(コンフォーカル光学系)
共焦点光学系では、点光源からの光が対物レンズを通過して対象物の表面に反射し、
反射光が再度レンズを通過してセンサーで受光されます。
センサーに入光する直前にピンホールと呼ばれる小さな穴があり、
焦点の合う位置で反射した光のみが通過し検出されることでフォーカス位置を判別します。
コントラストの高い鮮明なデータが取得できます。
1回の計測では広い面積の計測ができないため、
主にレーザー顕微鏡など限られた視野を計測する用途で使用されます。
合焦点法
合焦点法は、カメラと対象物の距離を少しずつ変動させながら、
光学的にフォーカスの合う位置を探索する計測法です。
複数枚の画像を撮像し、焦点ぼけの変化を分析することで、3次元形状を復元します。
Z軸方向に取り込める範囲が広く、面で計測できるため焦点法の中では高速で計測できます。
一方、計測精度は粗くなります。
2.3Dセンサーの使用用途
3Dセンサーの使用用途は計測手法により異なります。
時間遅延法
長距離の計測が可能な時間遅延法では車の自動運転や自動搬送車(AGV)などに搭載し、人や物を検知する用途が増えています。また、ドローンに取り付けて人が入りにくい場所の凹凸形状を撮影する用途にも使用されています。
三角測量法
三角測量法は適用できる範囲が広く、産業用途では精度・速度とも求められる製造現場での検査自動化に多く利用されます。製造製品の立体的な寸法計測や、ロボットと組み合わせることでロボットの目となって人に近い操作を自動化します。
また表面のキズや異物などを検出する外観検査では欠陥の有無だけでなく高さ・深さも計測ができるのでより正確な品質管理に貢献します。
焦点法
焦点法はμm以下の高精度計測が可能です。その分、1回の計測に時間がかかるため主に開発・研究用途で利用されてきました。しかし昨今ではセンサー技術の進化に伴い、速度が必要とされるインライン検査に対応できる製品も増え、μmレベルの外観検査に利用されています。
3.産業分野で活躍する3Dセンサー
3Dセンサーの精度・速度が向上したことで産業用途での利用も増えてきました。
製造現場では安定した計測精度とインライン検査のタクトタイム内で処理できる速度が要求されます。
製造現場に導入される3Dセンサーの主な用途に「寸法計測」「外観検査」「位置決め」があります。
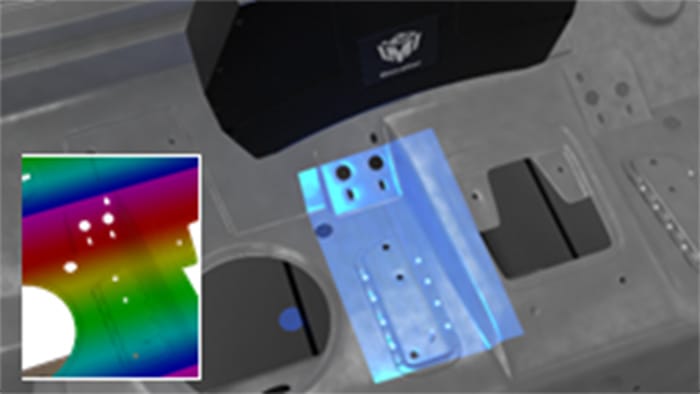
⼨法計測
加工された部品・製品が規定サイズに収まっているか、製造後に寸法計測検査を行います。
これまでマイクロゲージやノギス、検査治具などでの寸法測定は、個人差や測定条件による誤差が生じたり、正確性に欠けたりなど課題がありました。
また手作業で行う場合はタクトタイムに間に合わず全数検査をあきらめて抜き取り検査でしかできないケースがありました。3Dセンサーで高速撮影しインライン検査に適用することで全数検査も可能となります。また検査結果を数字で管理できるためトレーサビリティに計測結果を紐づけることもできます。
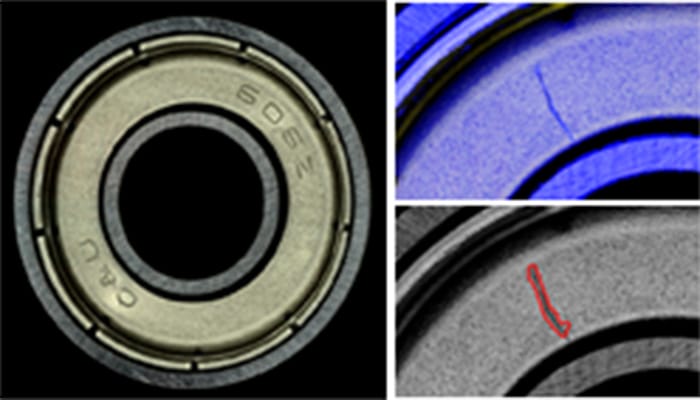
外観検査
対象物表面に見られるキズや異物などを検出する外観検査は、ワーク表面に照明を当てて得られる画像の濃淡をもとに検出します。
2Dセンサーでは、対象物表面に曲がりや歪みがある場合は照明が均一に当たらないという問題が発生します。
また、キズなどの凹みと異物などの凸は2次元画像では見分けがつかないケースが多く、過検出が発生して生産ラインを頻繁に停止してしまうという問題がありました。
これらの課題を解決するのが、3Dセンサーによる外観検査です。濃淡だけでなく、高さ値をベースに判定することで2Dより安定した外観検査が可能です。
また、画像処理ソフトウェアと組み合わせることで人の感覚に近い官能的な判定で検査することも可能です。
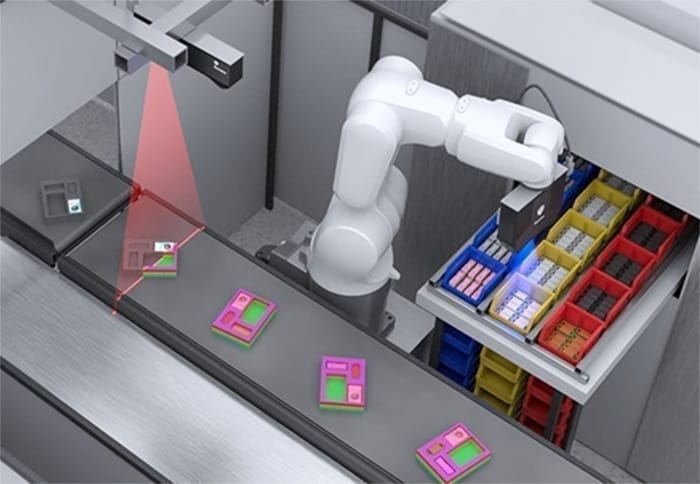
位置決め
人手で行っている生産工程を自動化するにあたり、ロボットや治具が対象物に対して正確に操作する必要があります。
基準位置からどれだけ、どの方向にずれているのか正確に計測することでロボットでの自動操作が可能になります。
3Dセンサーでは2次元的な位置ずれの他、奥行きや3次元的な角度ずれが算出できるためより高精度に位置決めが可能です。
これまで、3次元の位置決めシステムの開発は専門的な知識が必要でした。3Dビジョン用ソフトウェアが続々開発され導入も容易になっています。
4.3Dセンサー計測手法別製品比較表
3Dセンサーの具体的製品を計測手法別に比較表としてまとめます。
| 計測手法 | 分類 | 製品例 | Z高さ精度 | スキャン速度 |
|---|---|---|---|---|
| 光切断法 | 三角測量法 | 0.001mm~1mm | 数100~ 10,000ライン/秒 | |
| 縞投影法 | 三角測量法 | 0.01mm~0.2mm | ~6フレーム/秒 | |
| ステレオ法 (ラインカメラ) | 三角測量法 | 0.001mm~0.4mm | 18,400~ 34,400ライン/秒 | |
| 共焦点法 | 焦点法 | 0.05μm~0.5μm | 2,000~ 10,000ライン/秒 | |
| 白色干渉法 | 焦点法 | 0.001μm~0.1μm | ~2フレーム/秒 | |
| TOF | 時間遅延法 | Basler社製  | 5mm~10mm | 30フレーム/秒 |





5.3Dセンサーの計測手法別 製品紹介
Gocatorシリーズ
LMI Technologies社製のGocatorシリーズは光切断法、縞投影法、共焦点法の各種3Dセンサーを扱っています。
サブミクロンの精密計測から最大視野幅2mの広視野スキャンまで対応可能です。

光切断法/縞投影法/共焦点法
Gocatorシリーズ 製品の詳細についてはこちらをご覧ください。
heliInspect
heliInspectは非接触方式で最も精度の高い計測原理である白色干渉法を用いた3次元エリアセンサーカメラです。
通常白色干渉方式は1視野あたり数10秒の計測時間を要しますが、特別なCMOSセンサー技術によりワンショットあたり数100msでナノオーダーの計測を実現します。

白色干渉法 超高精度3Dエリアセンサー
heliInspect 製品の詳細についてはこちらをご覧ください。
3DPIXA
3DPIXAは高解像度のカラーラインセンサー2台をステレオで配置し、 2Dカラー画像と3D高さ画像を1回のスキャンで撮影できる3Dラインスキャンカメラです。
鮮明なカラー画像と高さデータを組み合わせることで2Dカメラでは対応できない高度な外観検査を可能にします。

ステレオ方式 ラインスキャンカメラ


