


物流・3PL業界への適用事例
物流業界では時間あたりの取扱い荷物量が増える中、人手不足が深刻です。
重量物の取扱い、輸送時間短縮、24時間稼働など課題も多く、自動化が急速に進んでいます。
コンベアやロボットによって仕分け、ラベリング、デパレタイズ などの作業を自動化します。
3Dセンサーはサイズ判別や位置決めの目として活躍しています。
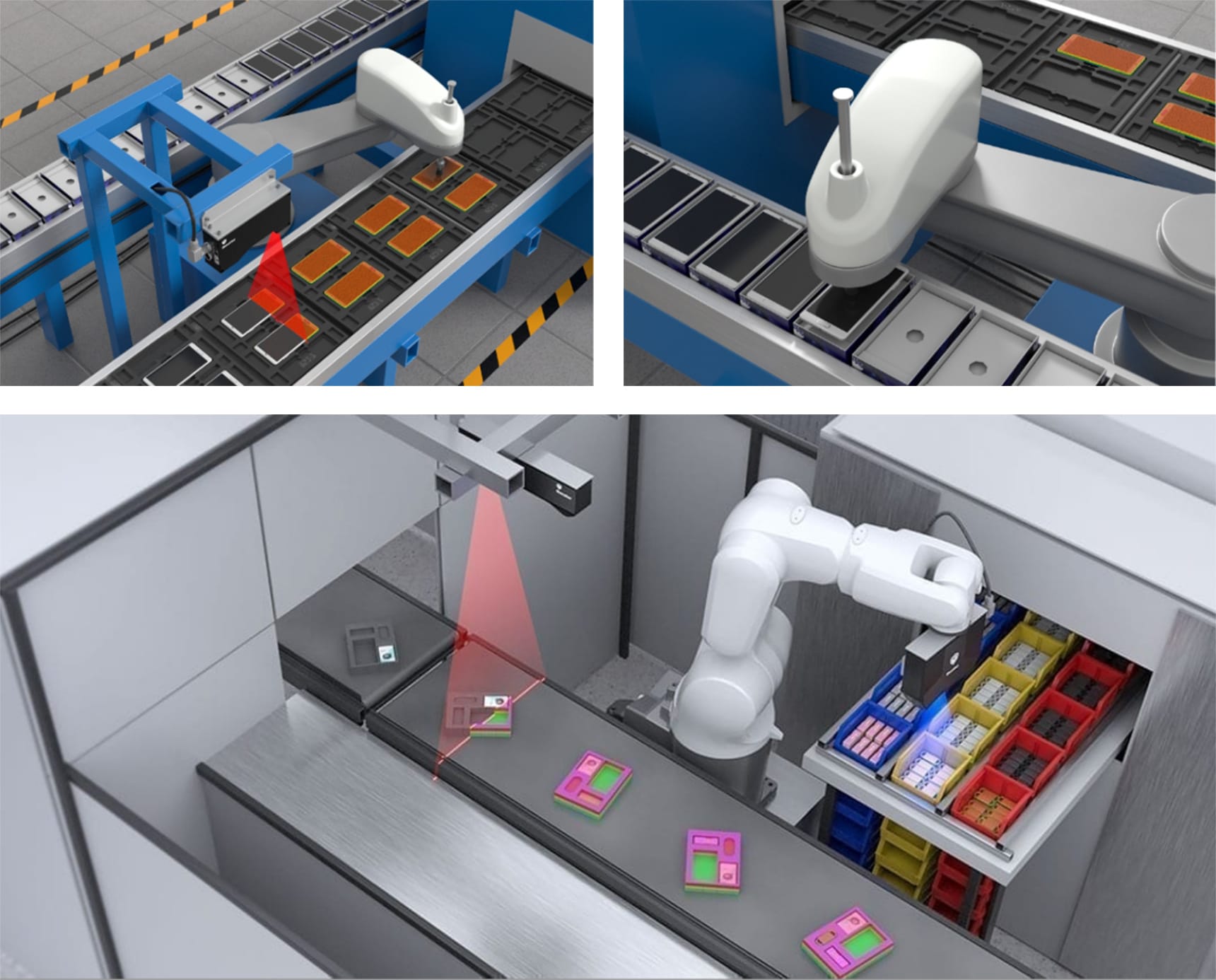
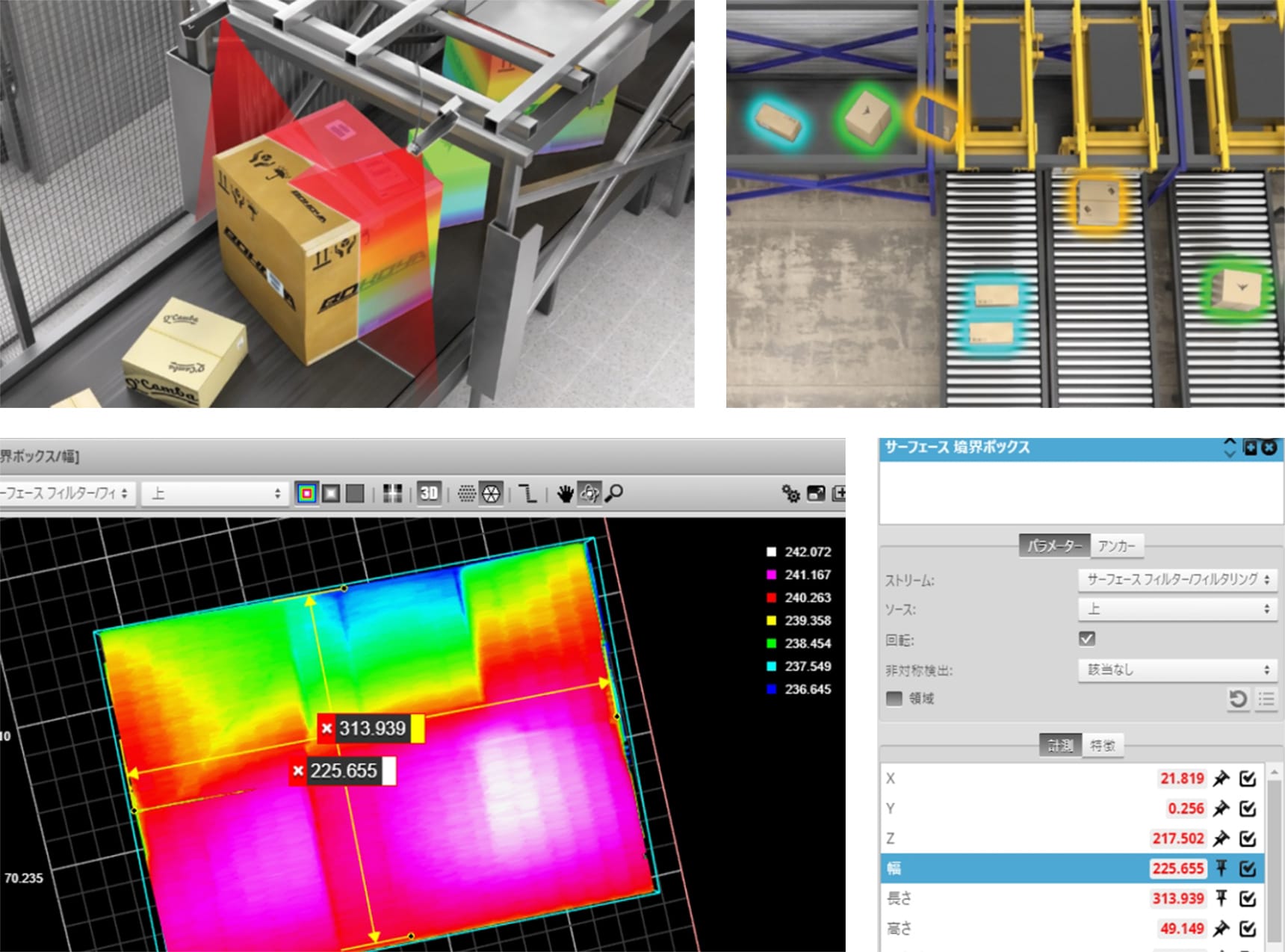
事例1 サイズ別自動仕分けとラベリング
ロボットによる荷物の自動ラベリングでは、従来コンベアラインに流す荷物のサイズと位置を揃えておく必要がありました。
3Dセンサーを使用することでサイズや位置の変動に追随できます。様々な荷物が混在するラインでも自動ラベリングが可能です。
コンベア上に流れる荷物を3Dスキャンし中心座標、3辺計測、高さ計測を行います。3辺サイズはラベル発行アプリケーションに送信・記録されます。また荷物の中心座標、サイズ、傾きがロボットに送信されます。
コンベアストッパで一旦停止させ、発行された送付ラベルをロボットで自動貼付けします。
ラベル貼付け位置は荷物の中心座標とサイズから自動的に割り出されます。
箱以外にも厚さ数mmの封書や衣類などが入ったビニール袋姿の荷物も同じセンサーで計測可能です。
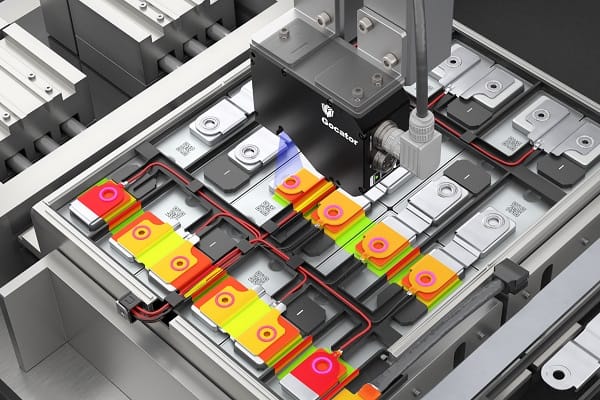
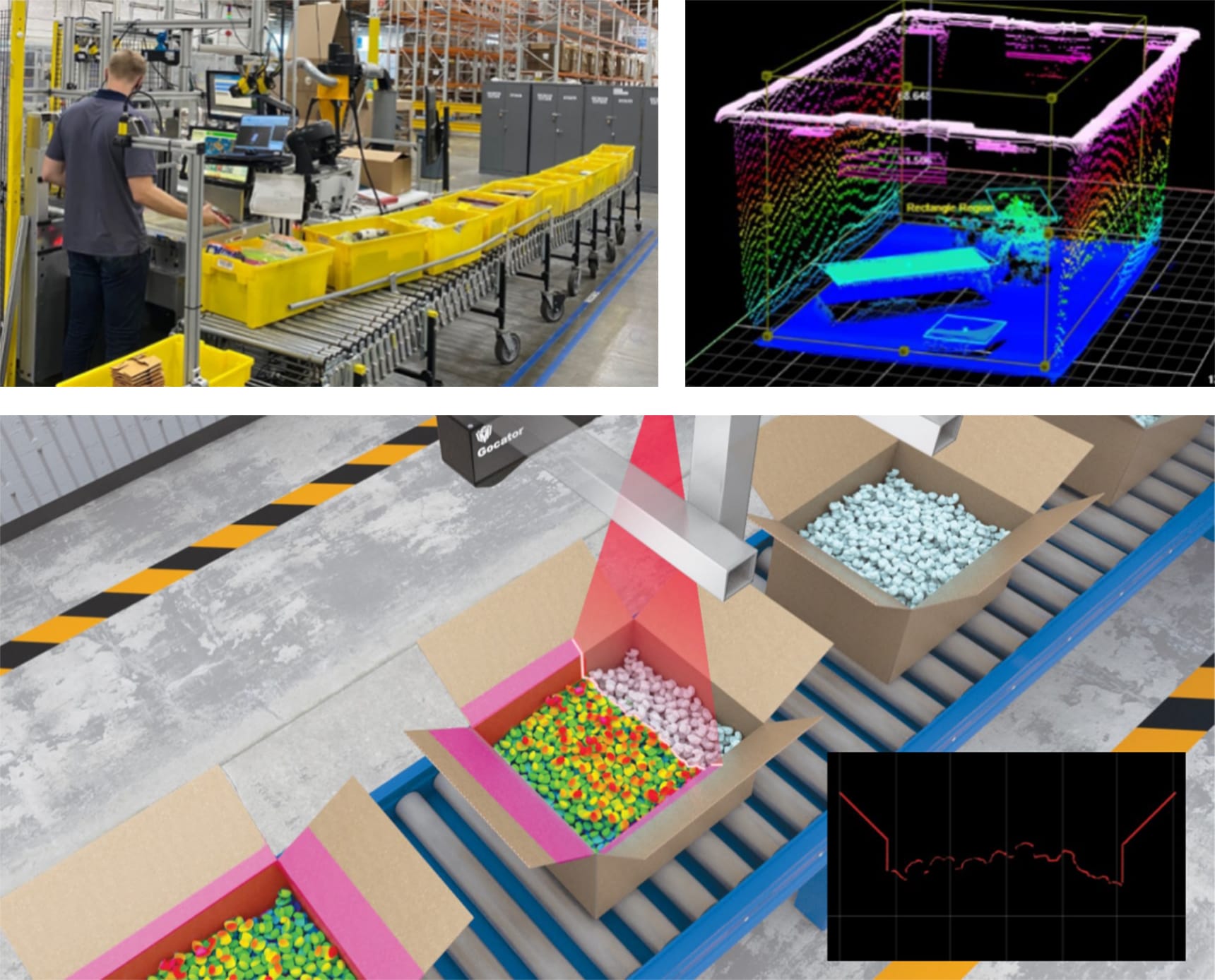
事例2 コンテナボックス内製品の容量計測・梱包箱サイズ推定
EC物流では輸送コストと梱包材量を減らすため、高い充填率かつ少ない箱数に収まる梱包が求められます。
コンテナボックスやトレーに入った様々な形状・素材の製品を3次元センサーで一度にスキャンし、総容量を算出して適した箱サイズを自動選定します。
3DセンサーGocatorでは内蔵の計測ツールで1つ1つの製品サイズを求めて、計測値の合計から箱内の充填率を算出することも可能です。
また、コンテナボックスなど深さのある箱でも死角除去タイプの3DセンサーGocator2880を使用することでボックス内の奥底まで捉えることができます。
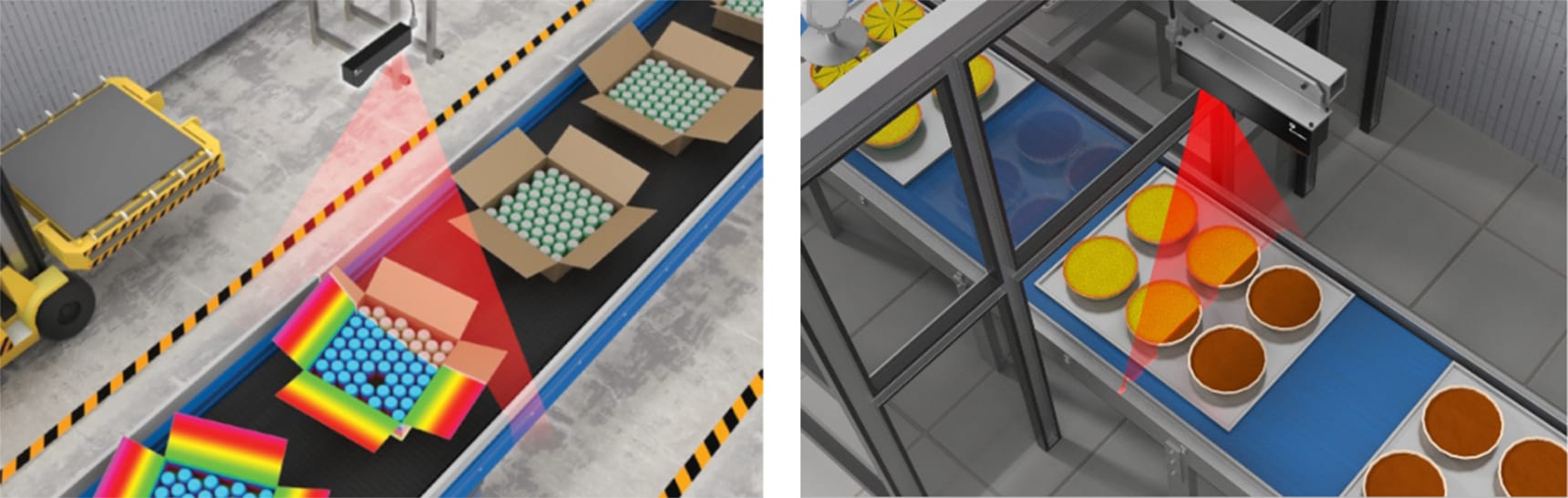
事例3 箱内製品の個数カウント・位置決め
箱内に並んだ製品の個数をカウントし過不足を自動判定します。
野菜や果物などの自然物は大きさや形状が少しずつ異なり、カメラで1個1個の領域を分けるには上から見2次元のデータに加えて3次元の凹凸情報が必要です。
3DセンサーGocatorはスキャンした3次元データから、内蔵の計測ツールを使用して製品1個1個の領域に分割し、各製品の位置、サイズ、容量を算出します。
各製品の位置座標を取得できるのでロボットによる自動ラベリングにも利用できます。
果物など軟らかい対象物に対しても正確な位置決めで人手をかけずにラベリングが可能です。
事例4 ロボットによるパレタイズ/デパレタイズ
デパレタイズの自動化では積み上げられた段ボール箱の境目位置を正しく認識し、荷物1個1個のサイズ・位置を正確に取得します。
取得された各箱のサイズと中心座標(XYZ)はロボットコントローラに送信され、ロボットで箱を掴みコンベアラインに並べていきます。
デパレタイズ作業の実施前と完了後では荷物の容量が大きく変わるため広い視野かつ深いレンジの3Dセンサーが必要です。
レーザー光を搭載した3Dセンサーなら離れた位置から広い範囲を撮影でき、荷物量の変動に追随します。また大型ロボットの妨げになりません。

事例5 ロボットによるピックアンドプレース
コンベアで流れてきたパーツをロボットで掴み箱に整列投入します。
常に同じ形状の製品が流れるラインではピックアンドプレースの自動化が進んでいますが、多品種にわたる製品のラインでは都度設定変更が必要です。
3Dセンサーを使用することで製品の寸法・高さを都度測定し、品種や位置の変化に対応します。
ロボットにオンハンドでセンサーを持たせることで近距離からの高精度な計測が可能となります。僅かな位置ずれや傾きを補正し、正確にピッキングします。
3DセンサーGocatorに内蔵の計測ツールを使用することで、対象物のサイズや位置の変化に追随し、ロボットの把持位置と回転角度を正確に算出します。