



| お問い合わせはこちら | 資料ダウンロードはこちら | AMRお役立ちコラムはこちら |
AMR導入の障壁:メンテナンス性
労働人口の減少、2024年問題など、搬送工程の自動化は今後避けては通れないトピックになっています。その解決策の1つとして、AMRの導入を検討される方が増えてきています。導入までのソリューション提案に加え、メンテナンス性も重要視されつつあります。よくあるお声として「ルートの変更や拡張を可能な限り自社で実施したい」「都度、メーカとの日程調整が大変」が挙げられます。iRAYPLEのAMRは立ち上げまでをわずか5ステップで実施可能です。日本のユーザーが求めるモノをしっかりと実装しています。
わずか5ステップ:iRAYPLE AMRの立ち上げ

ステップ1:周辺環境のマッピング
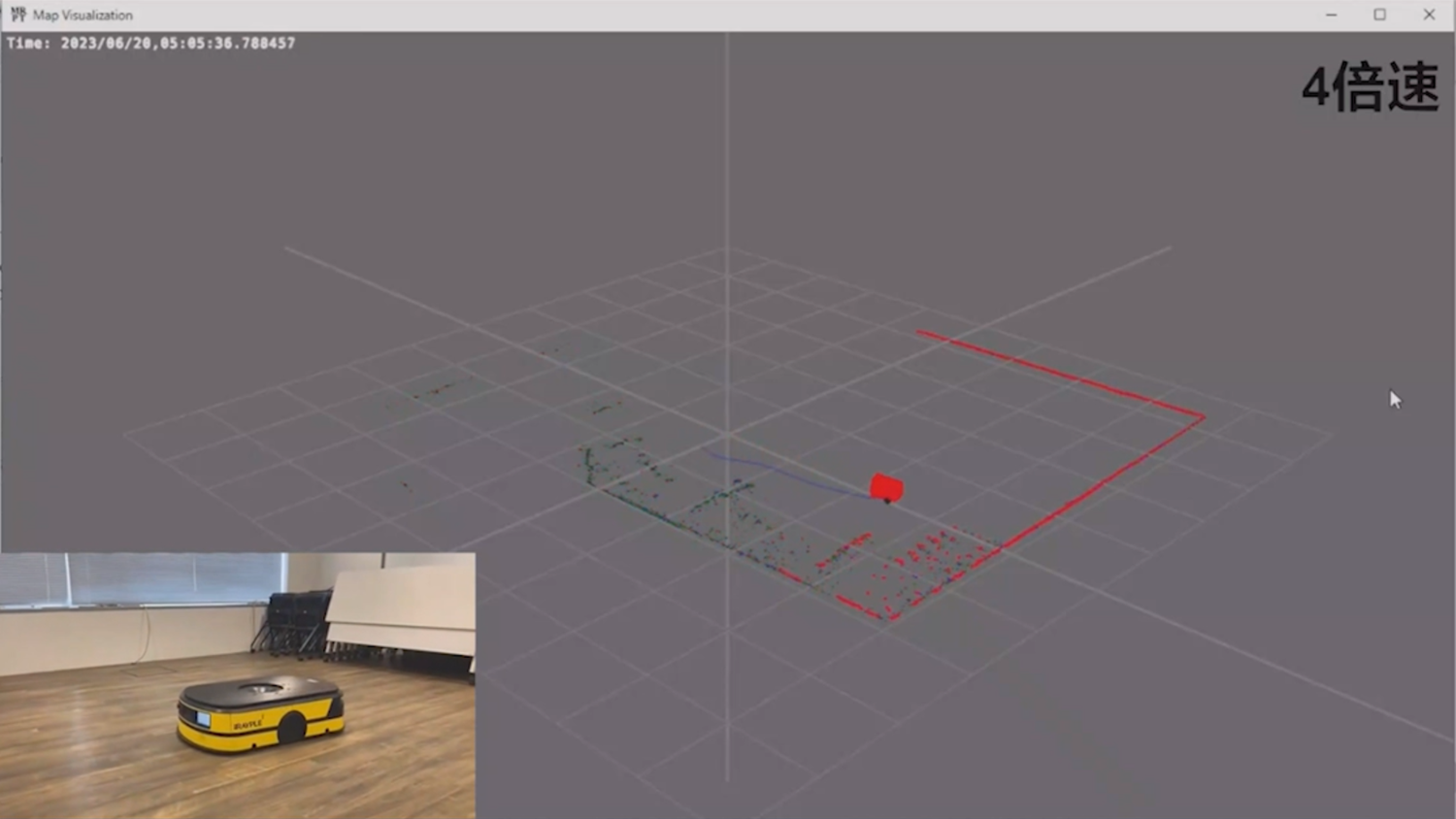
周辺環境のマッピングは専用ソフトウェアMap Platformを用います。ラジコンのように、PCのキーボード操作でAMRが走行する環境の周囲を走行させます。2周、3周と繰り返す必要は無く、1周走行させるだけでマッピングが完了します。
 クリックしたら拡大 クリックしたら拡大 | 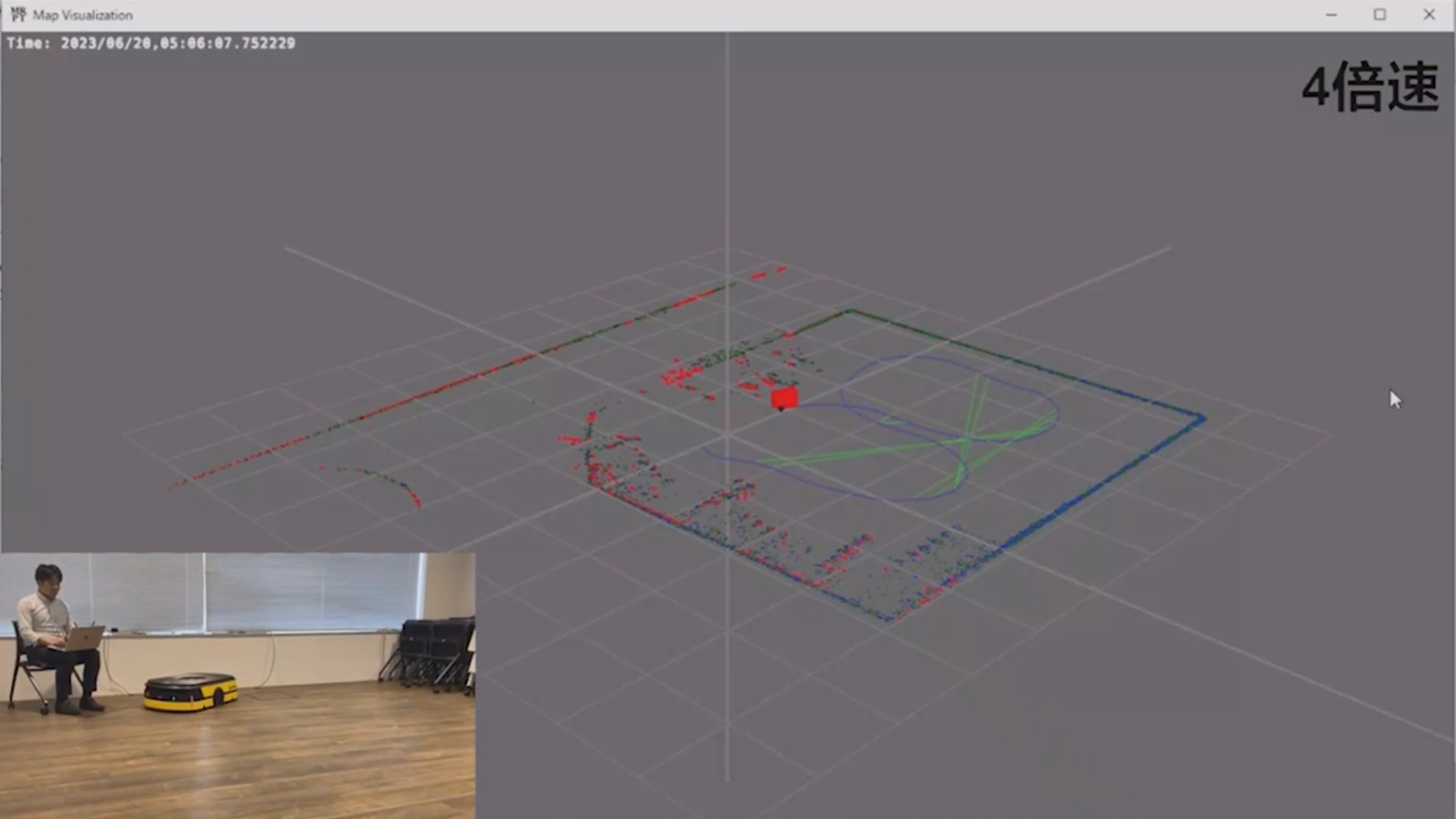 クリックしたら拡大 クリックしたら拡大 |
ステップ2:マップの編集
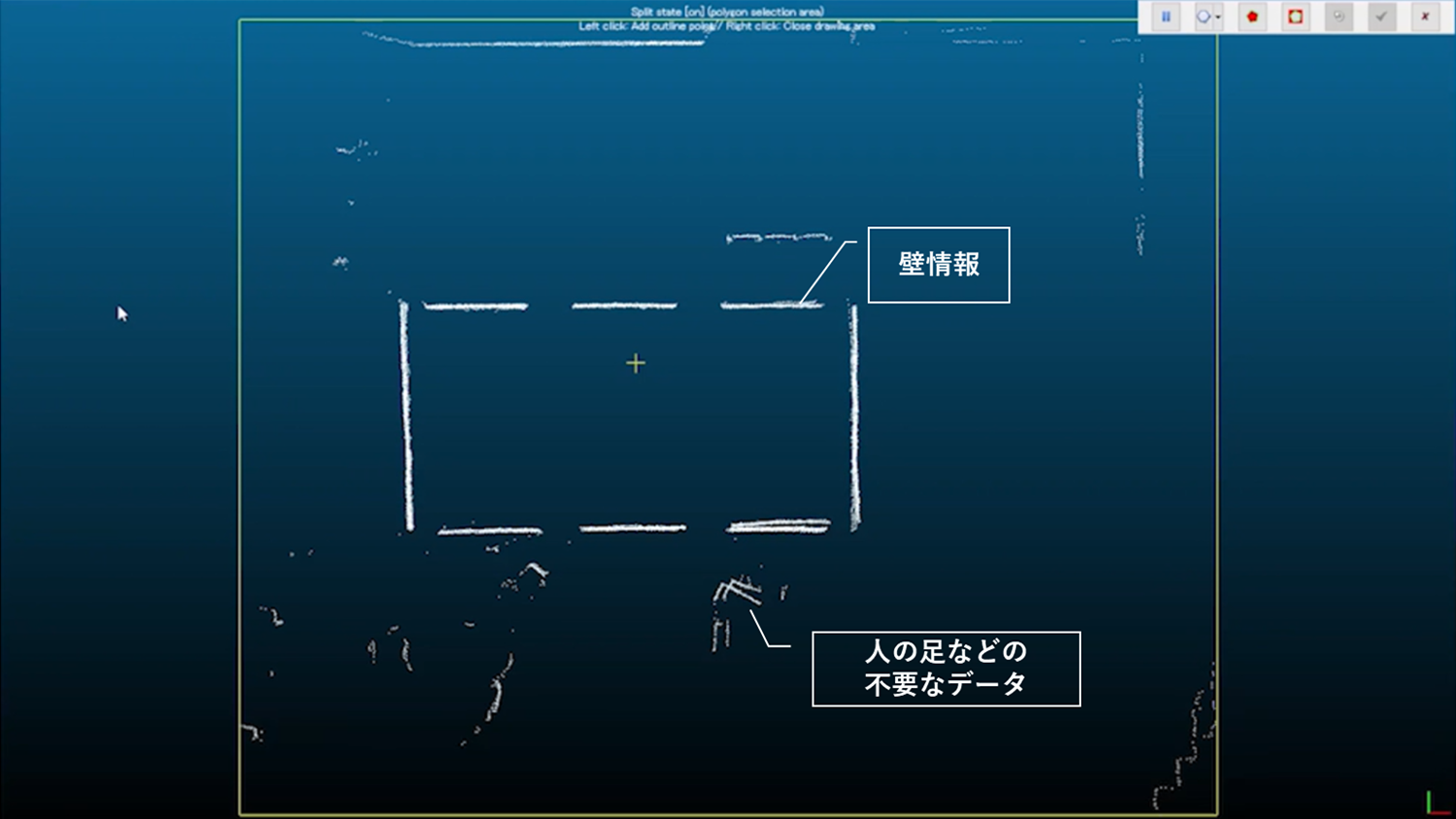
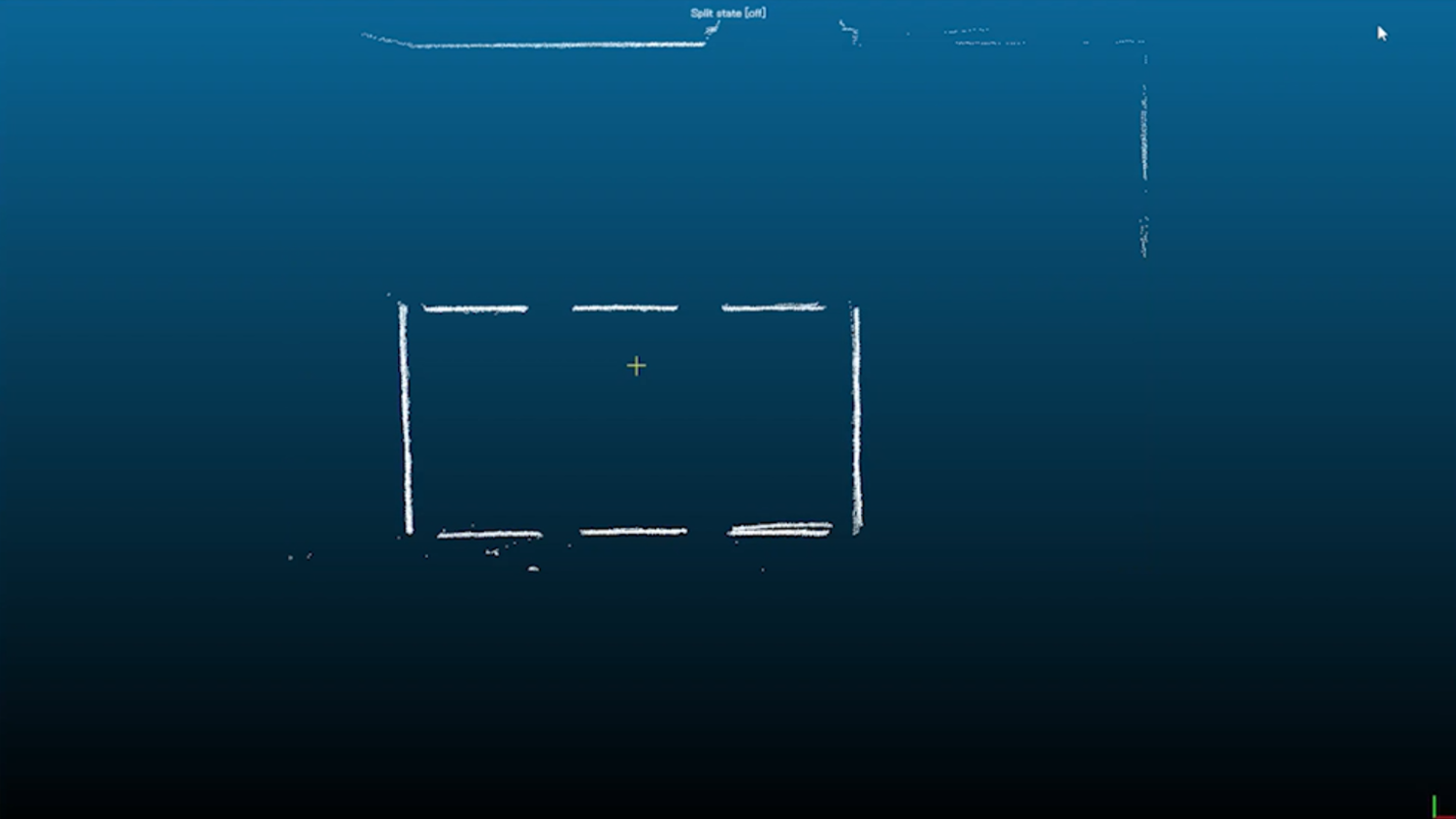
周辺環境をマッピングすると、下図の環境データが構築されます。この時点では、人の足などの不要なデータが存在しています。壁や柱などの動かないモノの情報のみが必要になるため、消しゴムツールを用いて除去します。
 |  |
クリックしたら拡大
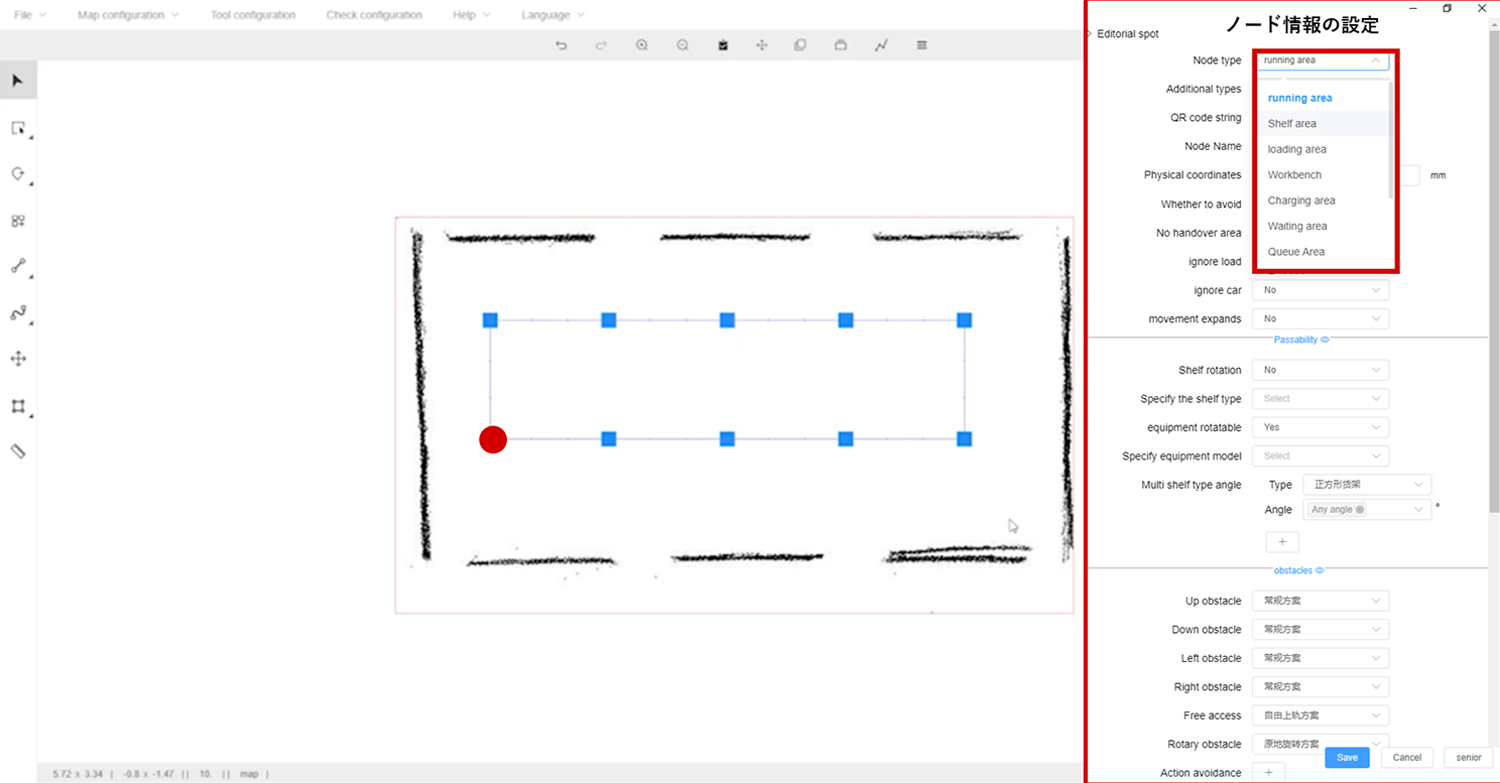
ステップ3:ルートの作成
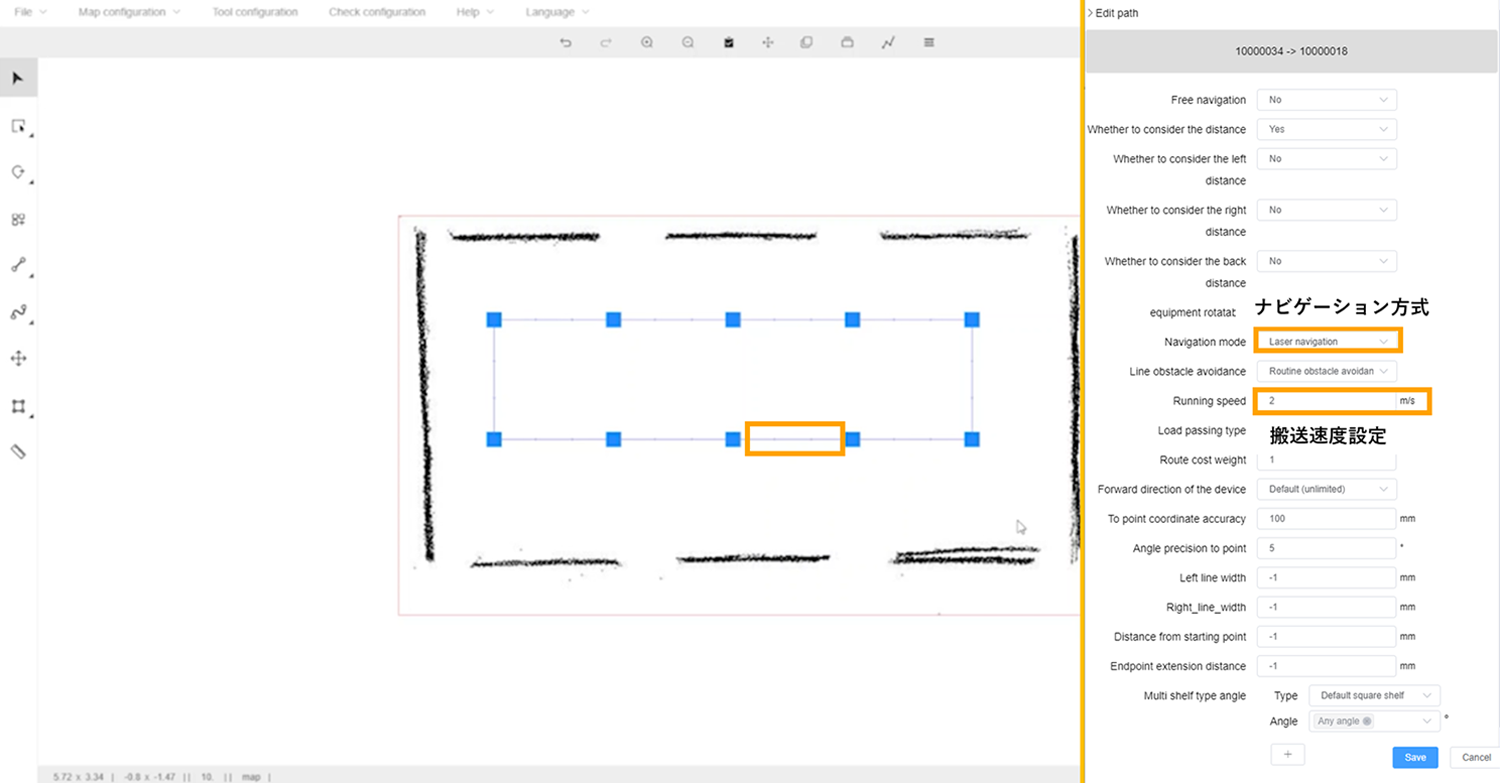
不要なデータの除去完了後、AMRが走行するルートを描画します。約1m~1.5m間隔でノードを作成し、それらのノードを繋いでいきます。必要に応じて棚置き場や充電場所など、ノードタイプを設定します。最後に、ノード間のルートのナビゲーションモード(SLAM / QR)と搬送速度を設定することでルート作成は終了です。1つ1つ個別に設定するだけでなく、いくつかのノード・ルートをまとめて設定することも可能です。

 |  |
クリックしたら拡大
ステップ4:マップのインポート
RCSに作成したマップをインポートします。
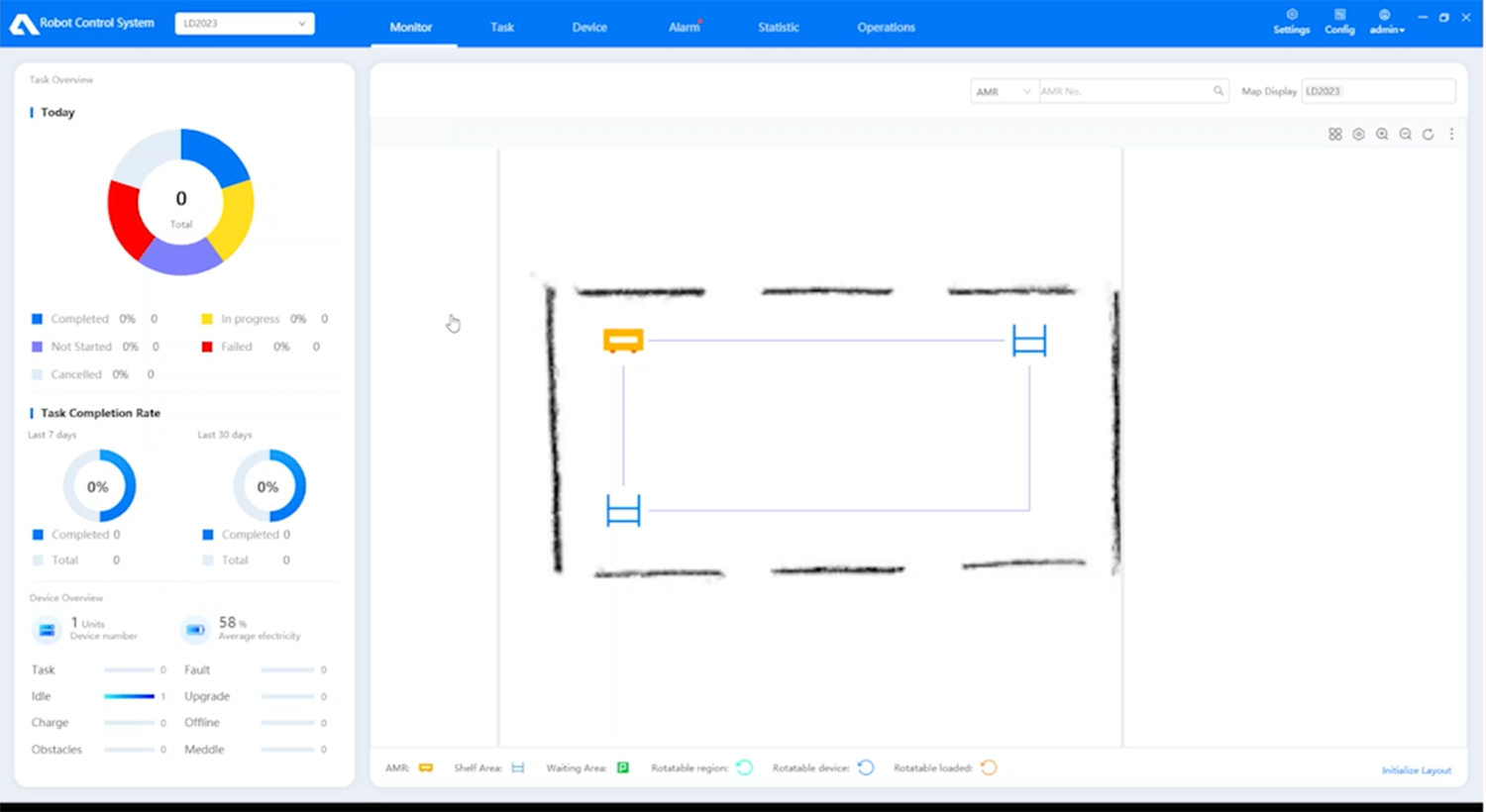
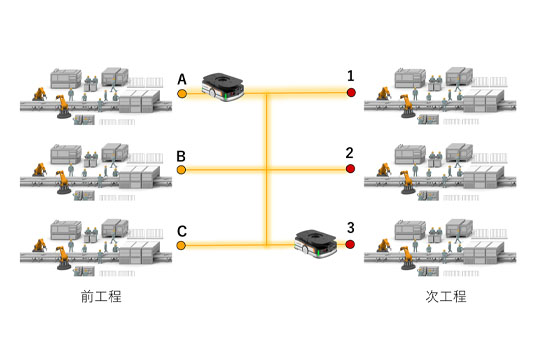
ステップ5:タスクの発行
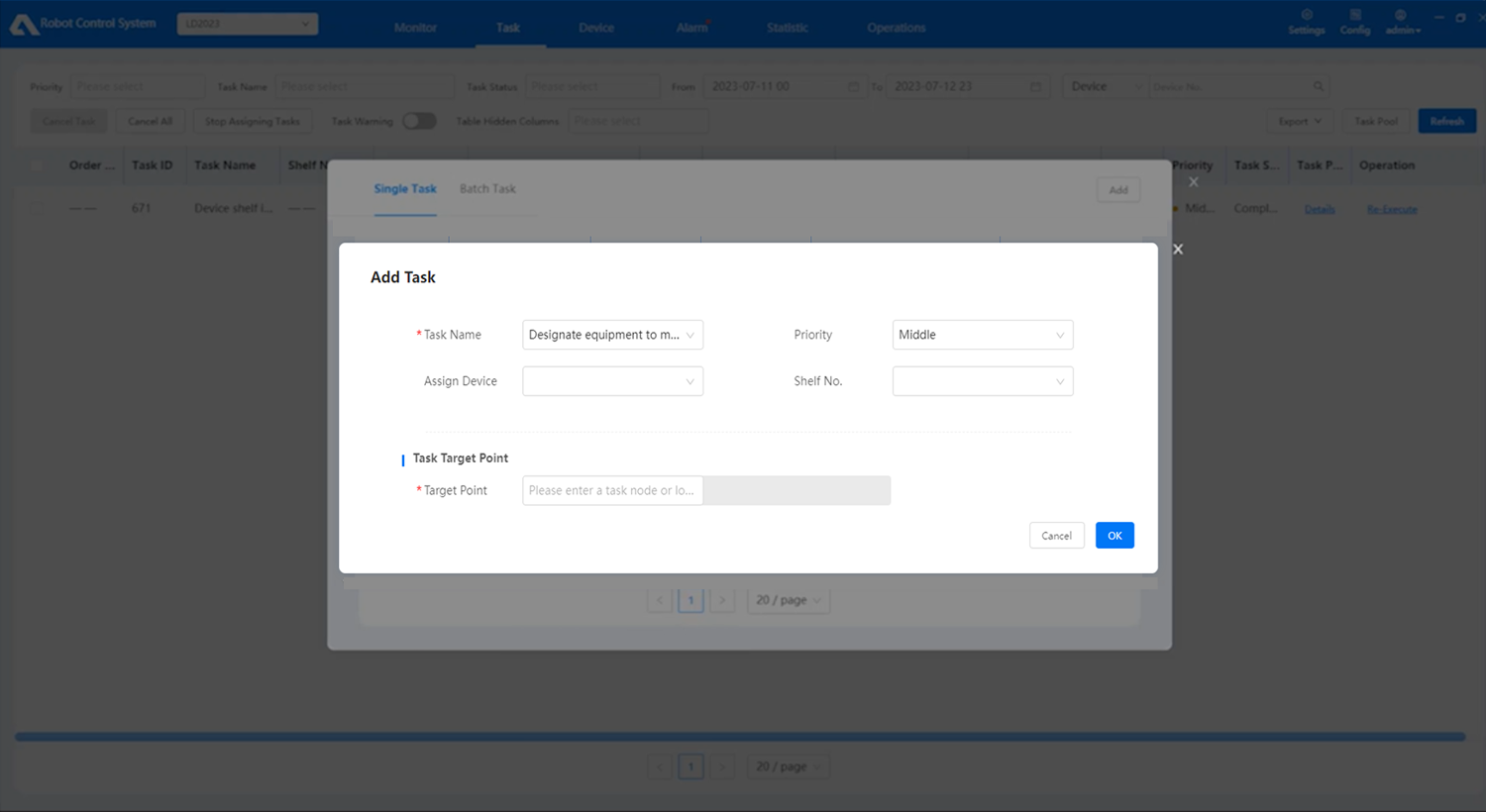
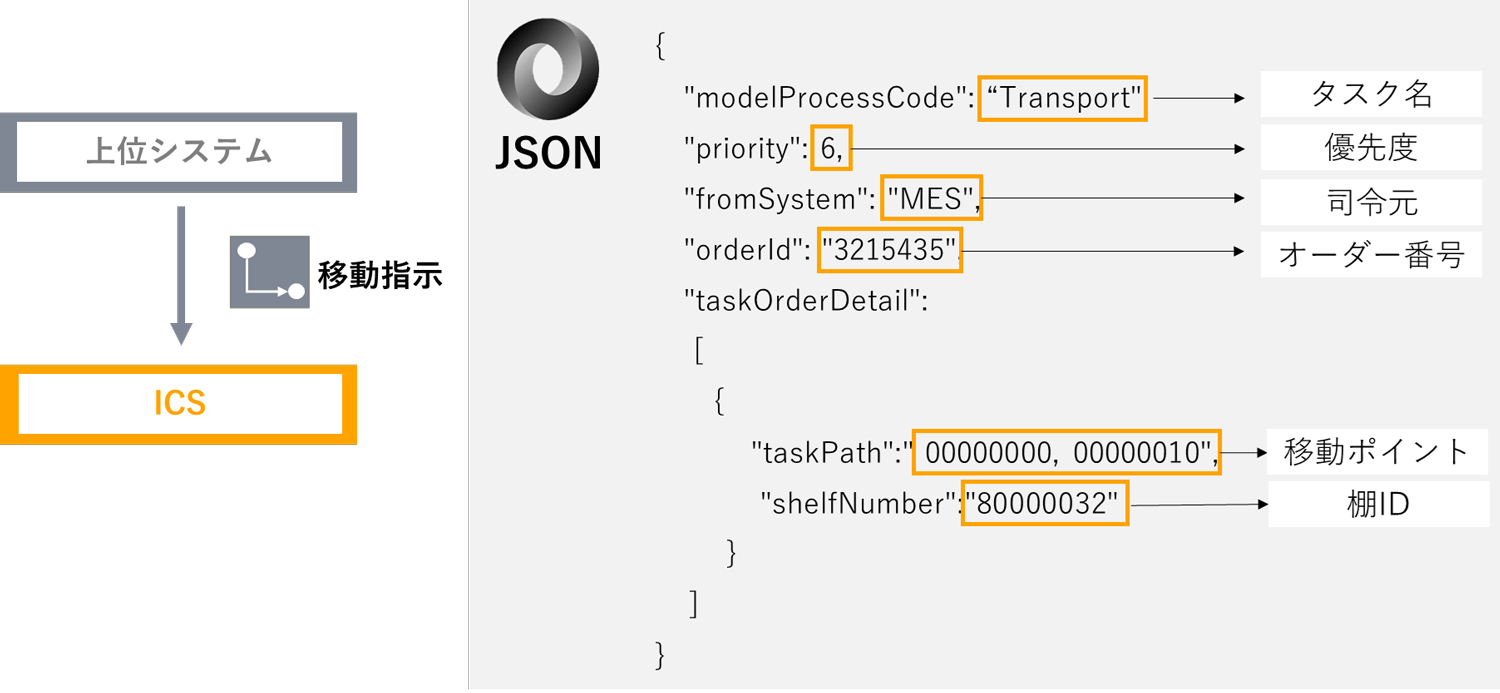
最後にタスクを発行すると、AMRが走行を開始します。タスクの発行は主に2通りの方法があり、RCS上で移動箇所を指定してタスクを発行する方法と上位システムから移動先を指定する方法です。製造ラインにいる作業者がその場で行き先を指示する場合は、RCS画面上で行き先を設定します。
 行き先の設定(クリックしたら拡大) 行き先の設定(クリックしたら拡大) |  タスクの実行(クリックしたら拡大) タスクの実行(クリックしたら拡大) |
上位のシステムと連携する場合は、JSONフォーマットに則り、タスク実行コマンドを送信します。実行コマンドも非常にシンプルで、移動ポイント(From / To)と棚IDを記載するだけです。
上記の通り非常に立ち上げやメンテナンスが非常に簡単に行えるように設計されています。可搬重量やソフトウェアの機能・性能は当然重要な検討要素ですが、導入後のメンテナンス性も大事な要素になります。AMRをご検討中の方、将来の導入へ向けて情報収集を行っている方、是非メンテナンスしやすいiRAYPLE AMRをご検討ください。
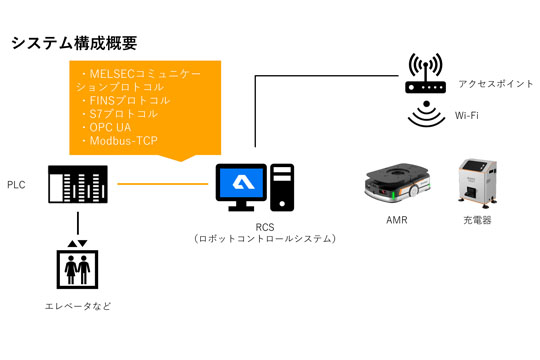
もちろん、ソフトウェア、ナビゲーション方式も充実!
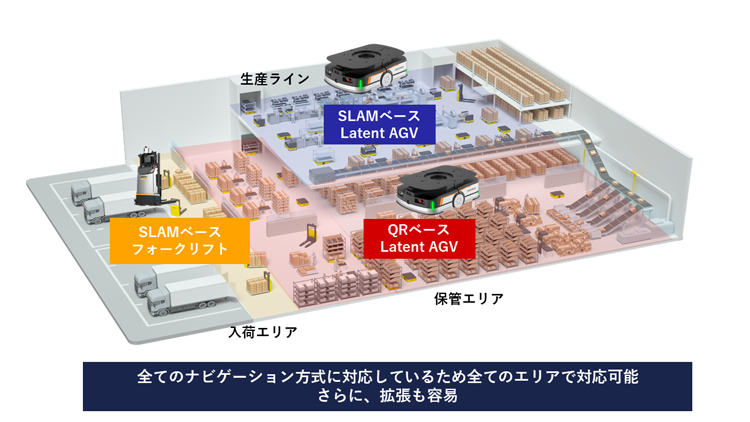
iRAYPLE AMRはSLAM / QR / テクスチャの3つのナビゲーション方式を1台に搭載しており、現場の様々な場所で走行可能です。専用機種では無いからこその柔軟性をご提供します。さらに、ソフトウェアも充実しており、最大500台までのフリートコントロールなど、求められる機能をしっかりと搭載しています。詳しくは以下のリンクから各号をご覧ください。
 LINX Express Vol.455 LINX Express Vol.455 | 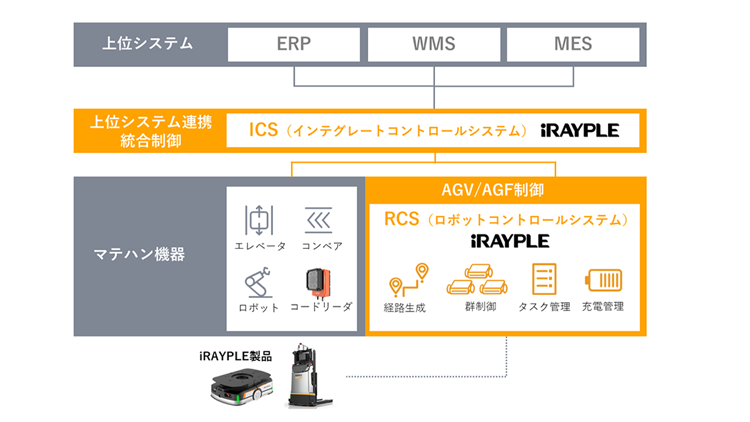 LINX Express Vol.458 LINX Express Vol.458 |
国際物流総合展に出展します

2023年9月13日から15日に開催される国際物流総合展に出展します。iRAYPLE AMRのフリーロケーションデモを展示しています。倉庫作業の自動化にお役立ちできるソリューションを直接ご覧いただけます。
また、3DセンサーGocator、iRAYPLE コードリーダを搭載したNECプラットフォームズ様の物流向け計測システム『荷物サイズ計測ユニット for コンベア』もLINXブースにて出展します。
是非弊社ブースにお立ち寄りください。
| 開催日程 | 9月13日(水)~9月15日(金) |
|---|---|
| 時間 | 10時~17時 |
| 場所 | 東京ビッグサイト 西展示場 |
| 小間番号 | 2Q-02 |
ご意見・ご感想募集
LINX Expressに関する要望やご感想を募集しております。下記フォームよりお気軽にご投稿いただけましたら幸いです。

いただいたご意見については今後の運営の参考にさせていただきます。皆様のご投稿お待ちしております。