


Synapticon SOMANET シリーズ用チューニングソフト
OBLACドライブ
LINX ExpressのVol.398ではSynapticon社のSOMANET Circuloシリーズについて、またVol.414ではSOMANET Nodeシリーズについて特集しました。(過去の特集記事はこちらからご覧いただけます。SOMANET Cirucloシリーズ特集 SOMANET Nodeシリーズ特集)。
今回各シリーズ共通で利用するサーボドライブ用のチューニングソフトウェアSOMANET OBLACドライブの特徴やその使用方法について詳しく解説します。
Synapticon社のサーボドライブSOMANETシリーズは、小型でありながらハイパワーな出力を備えた高性能サーボドライブです。同社のサーボドライブは、あらゆるブラシレスDCモータの特性を最大限引き出し、高速かつ高精度に制御することができます。
これを実現するために用いられるのがSOMANET OBLACドライブです。OBLACドライブは様々なメーカのモータを最適にチューニングするための各種機能が備わっているだけでなく、モータを制御するための各種パラメータを自動で調整する機能(オートチューニング機能)を備えています。多くの作業をGUI上から実行でき、作業者の負荷を軽減します。
OBLACドライブのチューニング画面の一例
OBLACドライブのシステム構成と概念
OBLACドライブはVMWare上で動作するソフトウェアで、ユーザはウェブブラウザを介して本ソフトを利用します。
OBLACドライブを利用するには以下の二つの何れかの方法があります。
1.Synapticon社から提供されているOBLAC BOXを利用する。
2.OBLACドライブ(チューニング用ソフトウェア)をダウンロードして利用する。
OBLAC BOXにはLinuxOS、OBLACドライブがプリインストールされており、購入後すぐにご利用いただけます。
一方、上記2の場合、対応OSはWindows、Linux、maxOSで実行できます。(ただし何れの場合も別途VMWareの用意が必要です。Windows および Linux の場合は VMware Player バージョン 14 以降、macOS の場合は VMware Fusion 10 が必要です。)
また2の場合、OBLACドライブそのものは無料でご利用頂けます。OBLACソフトへのアクセスはWEBブラウザ(推奨はchrome)を経由して行われます。
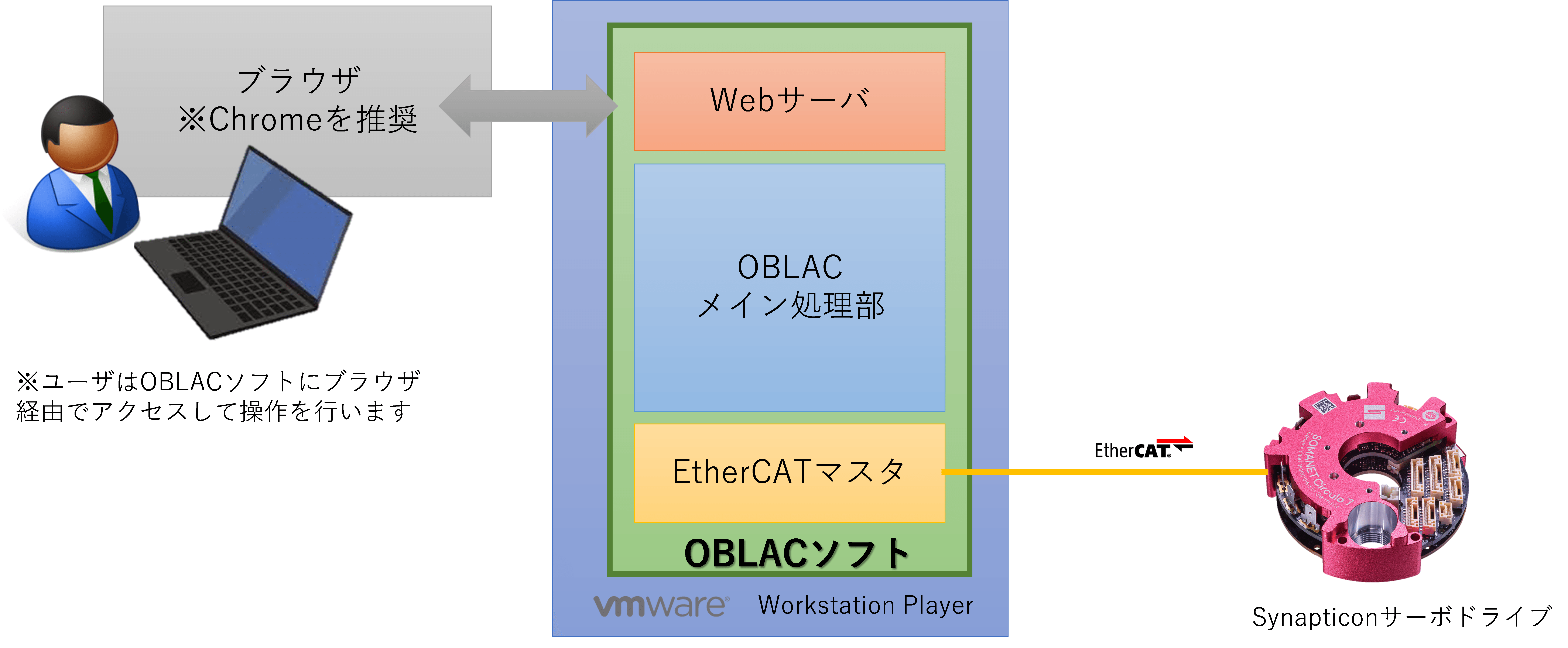
OBLACソフトを用いたシステム構成図
OBLACドライブを用いて調整できる機能
OBLACドライブを用いることでサーボモータを制御するための制御パラメータを簡単かつ高精度に調整することができます。またその調整結果はGUI上から確認できます。ここではOBLACドライブを用いて実行できる機能について紹介します。
| 機能 | 説明 |
|---|---|
| パラメータのセットアップ | モータ、接続するエンコーダもしくはホールセンサの設定を行います。この設定を行うことで制御パラメータが最適に自動調整されます。 |
| オートチューニング機能 | サーボモータを最適に制御するための制御パラメータの自動調整を行います。またより高度な設定を行うために手動で微調整を行うことも可能です。 |
| コギング補正機能 | モータの回転子と固定子間の磁気相互作用によって引き起こされるコギングを補正します。これにより低速時の挙動を改善することが可能です。 |
| 弱め界磁制御機能 | トルクを低下させてモータの速度を定格以上に上げる機能です。回転子の磁界を速度範囲にわたり弱めることでモータの速度範囲を増加させることが可能です。※1 |
| アンチワインドアップ制御機能 | 制御システムの積分器のワインドアップ(飽和)による応答性の劣化を防止する機能です。これにより応答性を損なうことなくシステムが不安定になることを防止できます。 |
| ゲインスケジューリング機能 | モータの目標速度、目標位置によって制御パラメータを可変にする機能です。この機能を用いることでより高速かつ高精度にモータを制御できる場合があります。 |
| 速度フィードフォワード制御機能 | 速度フィードフォワードを用いることで応答性を改善できる可能性があります。 |
| 各種フィルタリング機能 | フィードバックノイズ、エンコーダノイズ等による高周波成分をカットすることで制御システムを安定的に制御することができます。また機械システムの共振や電気的な共振を含む場合はノッチフィルターを適用することでシステムを安定化できる場合があります。 |
OBLACドライブを用いた調整の全体の流れ
OBLACドライブの多くの作業はウィザード画面もしくは、自動調整により実行されるので、モータやモータ制御に関する高度な知識がなくても実行することが可能です。一方でモータ制御に関する高度な調整を要求される場合でも豊富な機能により、最適な調整を行うことも可能です。ここではOBLACドライブを用いた全体の作業の流れについて解説します。
ステップ1)モータおよび使用するエンコーダのパラメータを設定します(手動)
ステップ2)モータのシステムモデルの同定を行います(自動)
ステップ3)位置制御のオートチューニングを実行します(自動)
ステップ4)速度制御のオートチューニングを実行します(自動)
ステップ5)動作確認を行い、調整が期待通りか確認します
ステップ6)必要に応じてマニュアル調整を実行します
自動調整を行う際の流れは上記のとおりで、これらの作業はすべてOBLACのGUI上で完結します。
次項ではこれらの作業を行うための代表的な作業についていくつかご紹介します。
OBLACドライブを用いたパラメータ設定の全体の流れ
通常モータを制御するためには、制御系のパラメータを調整する前に、モータやエンコーダの様々なパラメータ設定を事前に設定する必要がありますが、OBLACドライブはこれらのパラメータを設定するための極めてわかりやすいGUIを提供しています。
わざわざマニュアルを参照することなく直感的な手順でサーボドライブのパラメータ設定が可能です。具体的にはウィザード画面に従いこれらのパラメータの設定ができるので、漏れなく必要なパラメータの設定を完了できます。以下にその流れを説明します。
ステップ1)ドライバの名前の設定
ステップ2)ブレーキのセットアップ
ステップ3)モータのセットアップ
ステップ4)センサのセットアップ
ステップ5)オフセット検出
以上のステップを経ることで基本的な設定を完了させることができます。
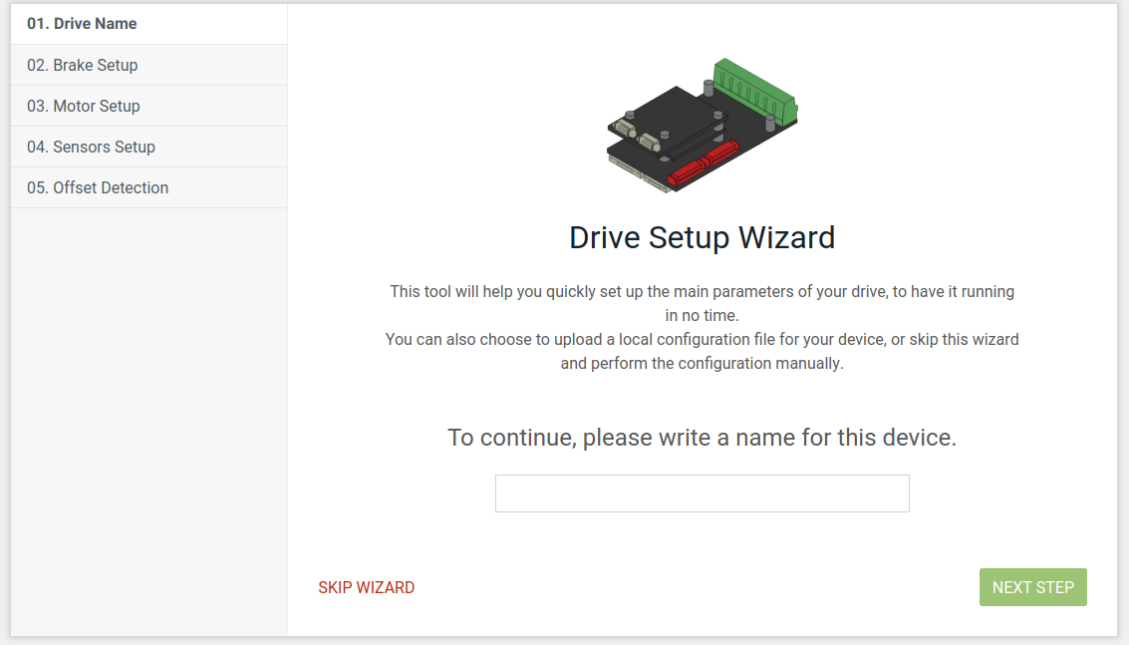
OBLACドライブのセットアップウィザード画面
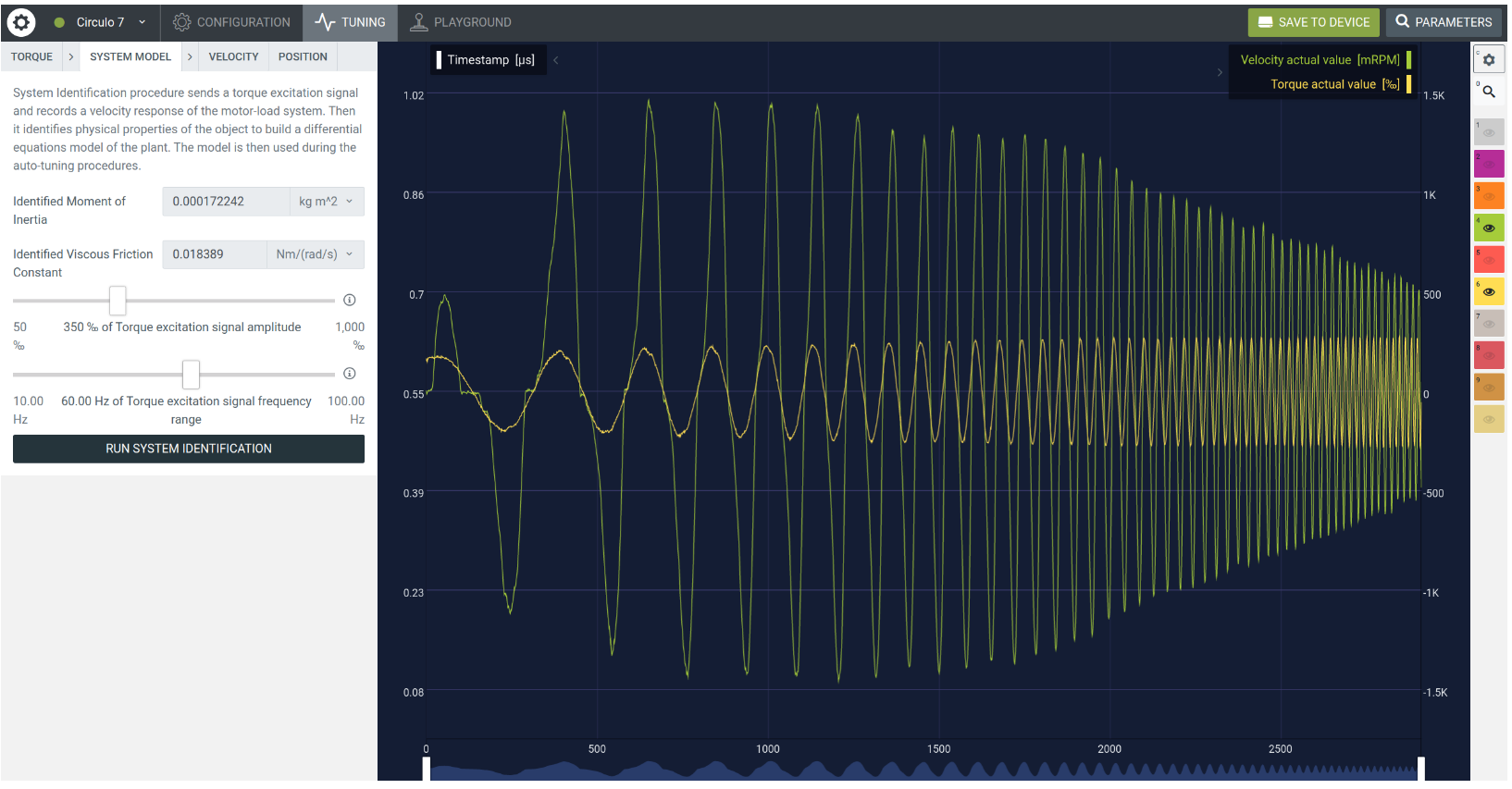
制御モデルのシステム同定
OBLACドライブには制御対象であるモータ(減速機を含む場合はそのシステム全体)の特性を同定する機能を備えています。具体的にはシステムが有する慣性モーメントや粘性摩擦係数を同定することで、制御システム全体をモデル化します。またこれらの作業は画面上のシステム同定ボタン一つで実行できます。
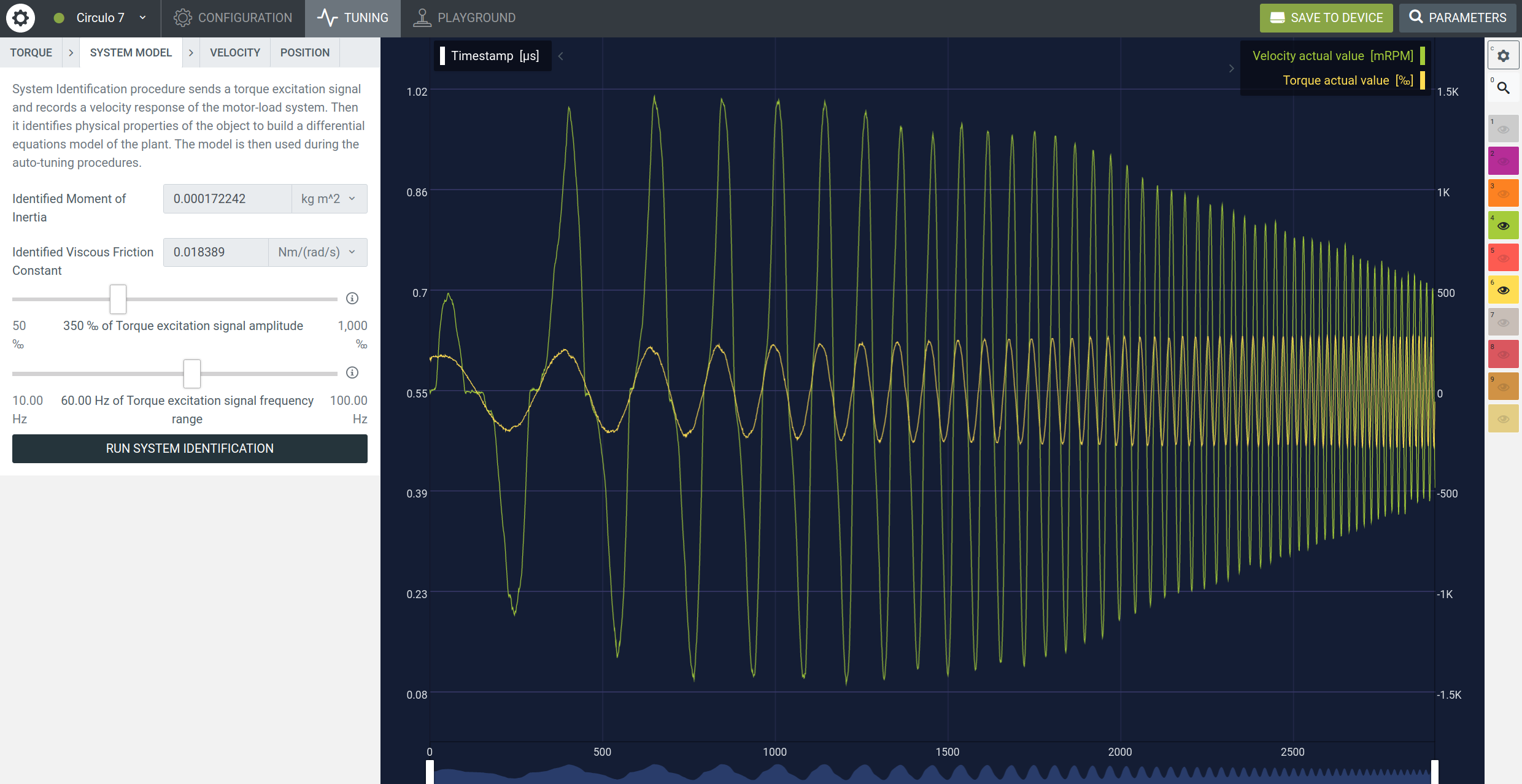
システム同定時のOBLACドライブの画面
オートチューニング
OBLACドライブを用いれば位置制御、速度制御のためのゲイン調整も非常に簡単に実行できます。
また制御モデルも通常のPID制御だけでなくカスケード制御等複数選択することができるので、ユーザの希望にあったシステムモデルで制御系を構築できます。
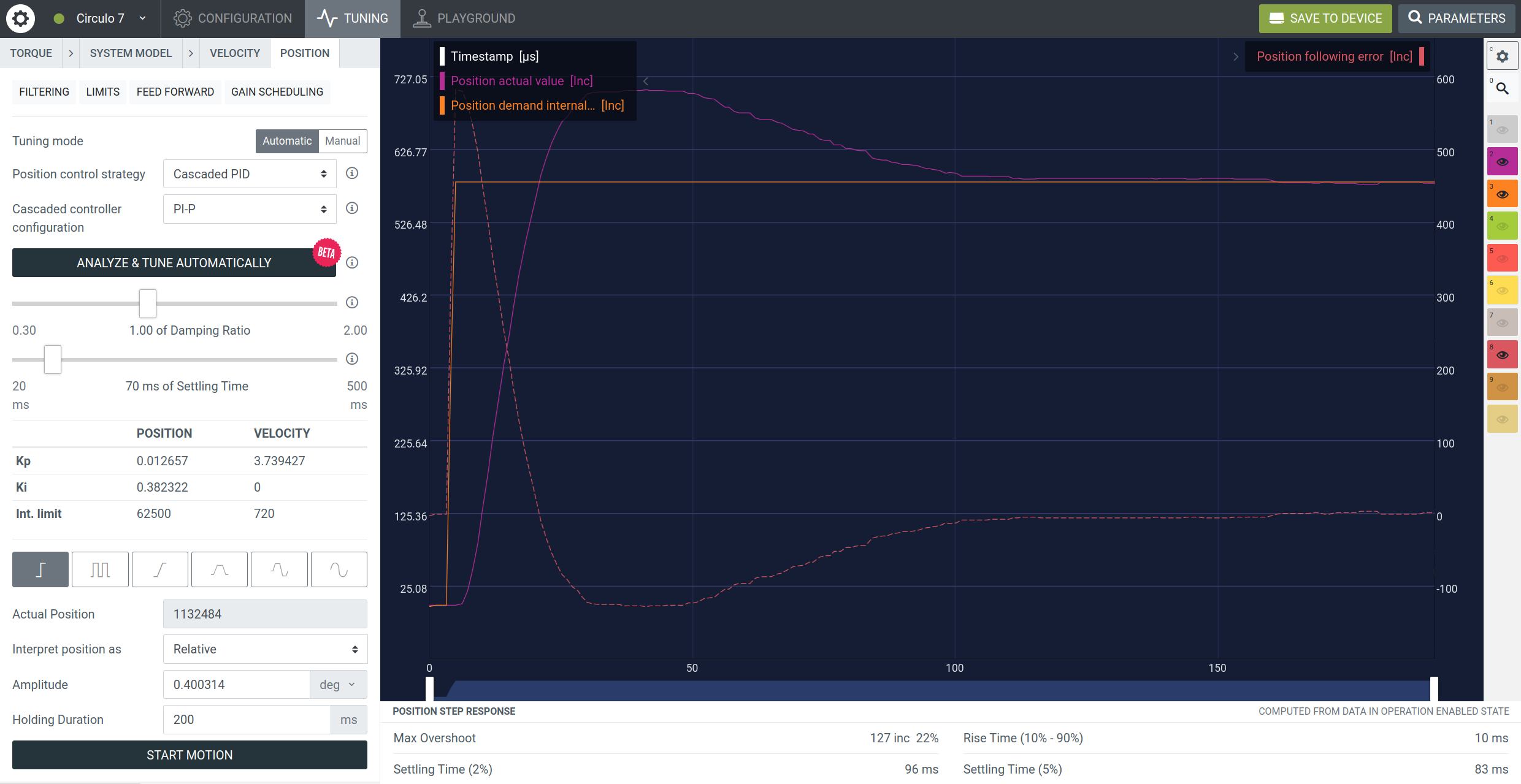
位置l制御オートチューニング時のOBLACドライブの画面
コギング補正
コギングは、モータの回転子と固定子の間の磁気相互作用によって引き起こされる効果です。
その結果、モータの回転中にトルクリップルが発生し、特に低速域でのモータの不均一な動きを引き起こすことがあります。この現象は、低コストのモータで特に懸念されますが、OBLACドライブを用いることである程度補正することが可能です。
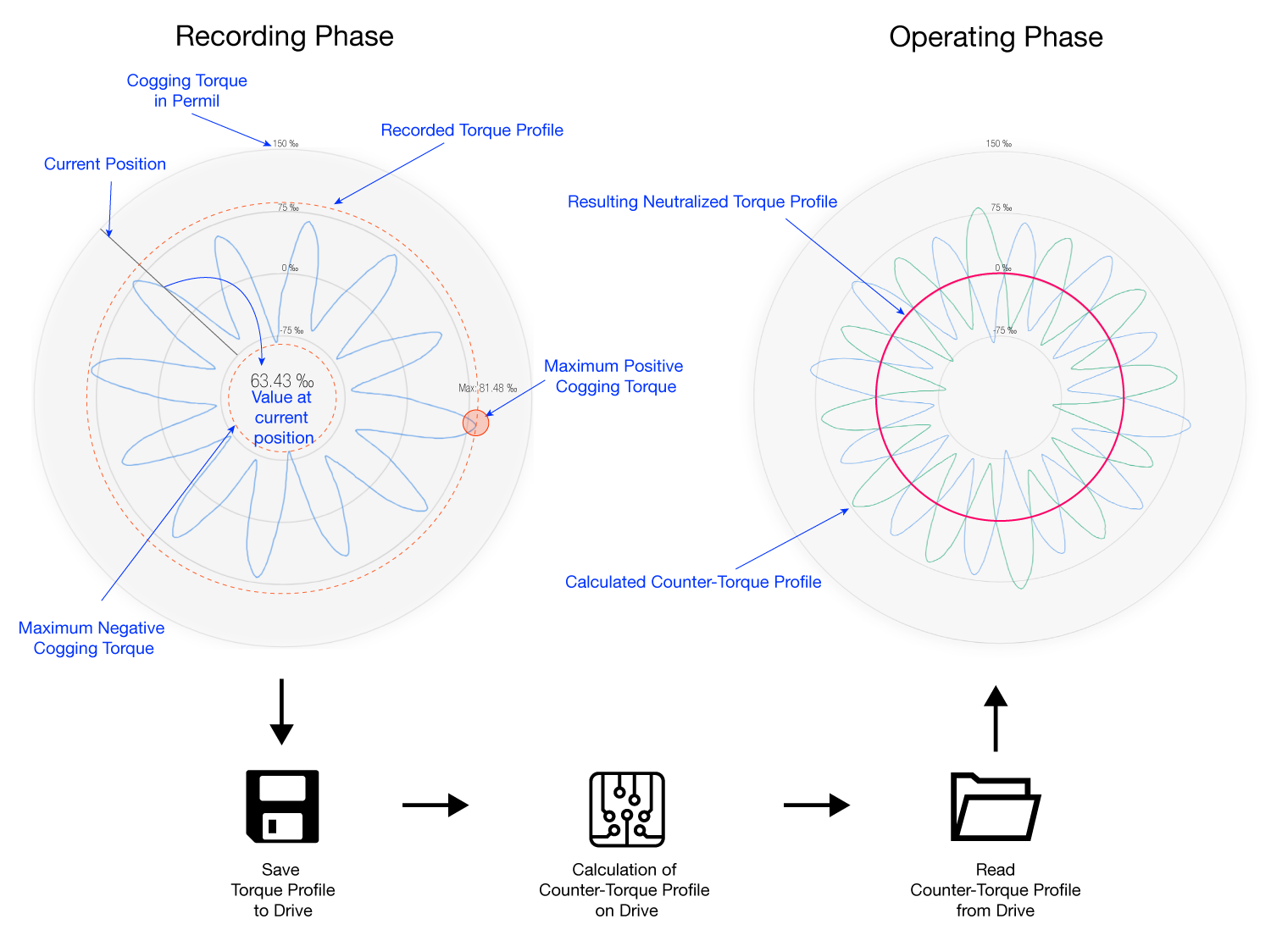
OBLACドライブを用いたコギング補正の効果の一例
お問い合わせ
本号でご紹介させていただきました「Synapticonサーボドライブ用チューニングソフト OBLACドライブ」の詳細やご質問に関しましては、下記フォームへのご連絡をお願い致します。
ご意見・ご感想募集
LINX Expressに関する要望やご感想を募集しております。下記フォームよりお気軽にご投稿いただけましたら幸いです。

いただいたご意見については今後の運営の参考にさせていただきます。皆様のご投稿お待ちしております。