



工場や倉庫における構内物流の形態は様々です。荷積みや荷下ろしのステーションが都度異なるようなフレキシブルな搬送が求められるケースも多くなっています。Navithorフリートコントロールはこれらの多様な搬送方法に対応可能です。今回はそのようなフレキシブルな搬送を実現するNavithorの活用方法2つをご紹介します。
組み立てライン搬送に最適!搬送指令方式
AGVに対して都度目的地への走行命令を出すことで制御するのがドライブオーダー方式です。イメージとしてはコンビニ配送やミルクランのような、パターンに沿った搬送を実現できます。
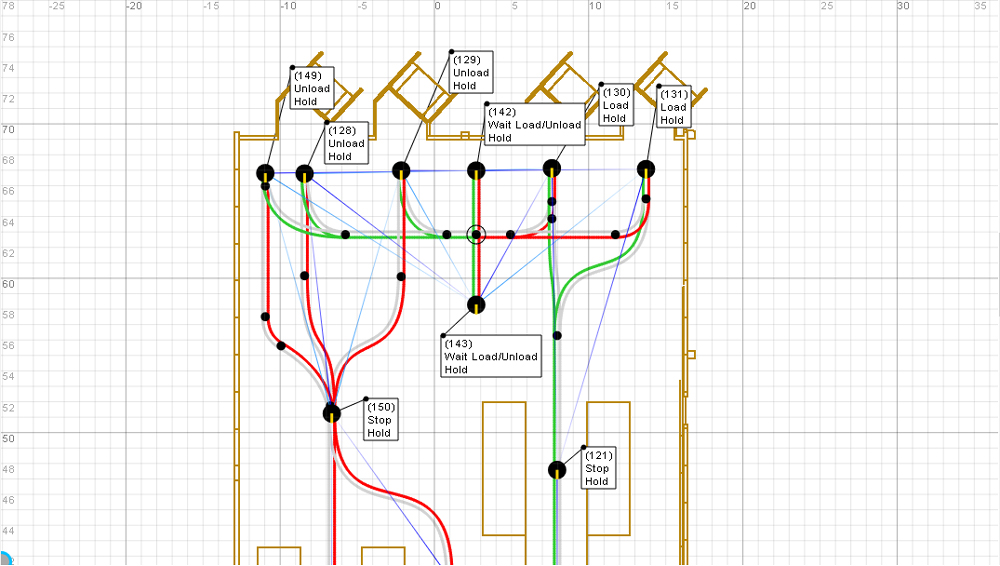 | 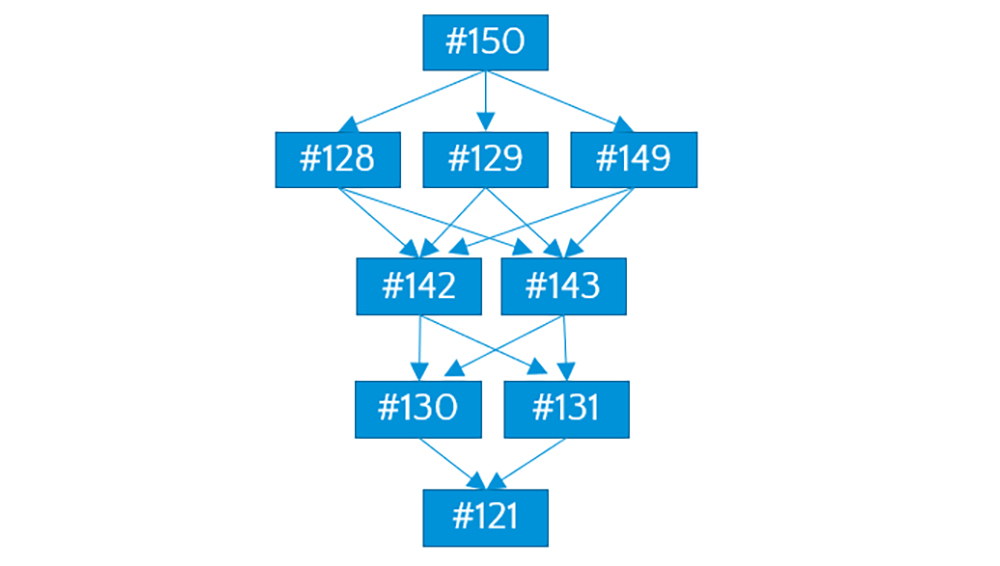 |
ドライブオーダー方式
この方式は各ポイントに次の目的地候補をいくつか登録しておき、都度選択することで多様な搬送パターンを実現できます。また、走行のトリガは、例えば各ステーションにボタンを設置して作業者がそれを押すことで次の目的地に走行させます。押しボタンの代わりにタイマーや外部センサを使用することも可能です。
さらに、搬送パターンをテンプレートとしてとして予め登録しておき、一連の搬送を外部トリガなしに実行するといった方法も可能です。
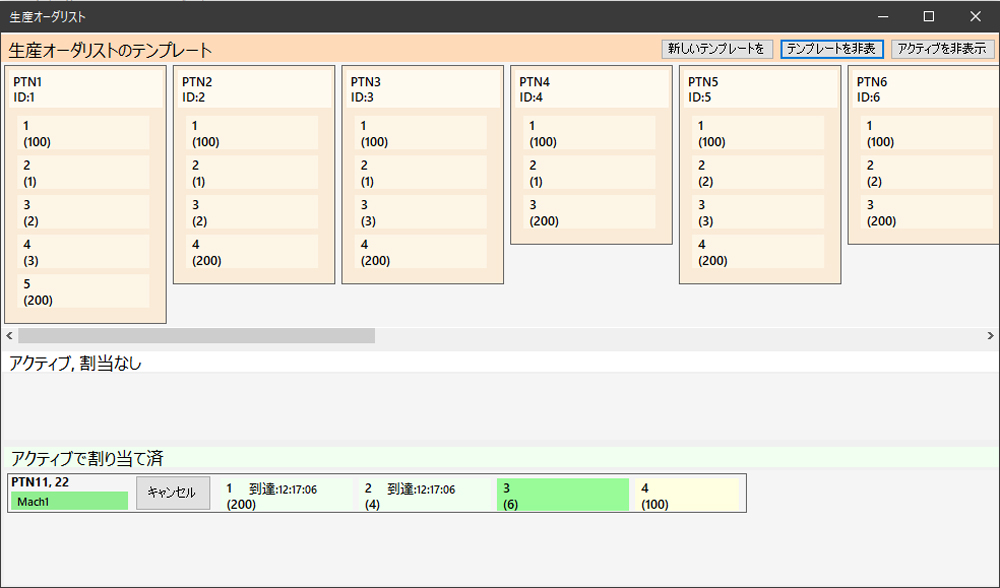
搬送オーダーリスト
リソースベース搬送
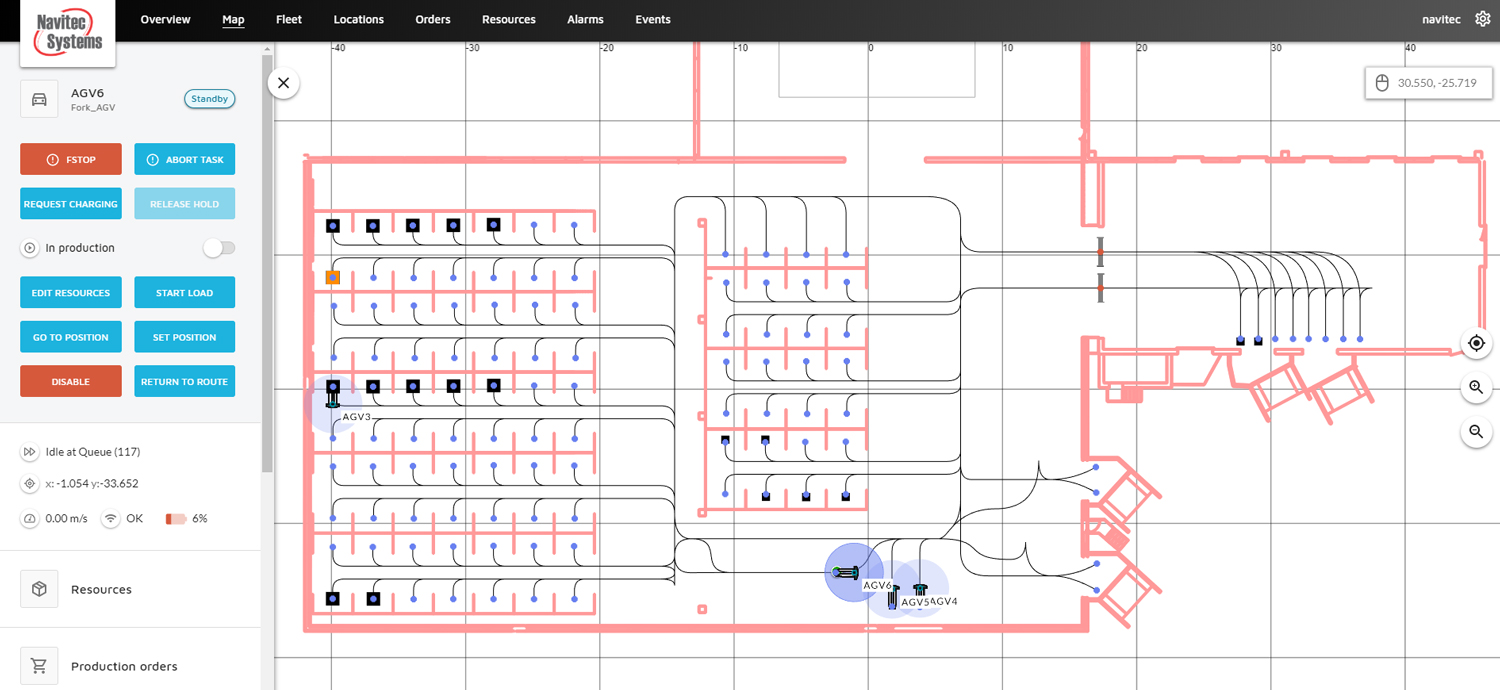
被搬送物にフォーカスして搬送を制御する方式がリソースベース搬送です。各ステーションにおける投入、排出をトリガにして自動的に搬送を実行します。例えば、下図の搬送フロアでは、ステーション#99, #100に搬送物が置かれると、AGVがそれを受け取り#70番台の空いているステーションに次々と投入します。
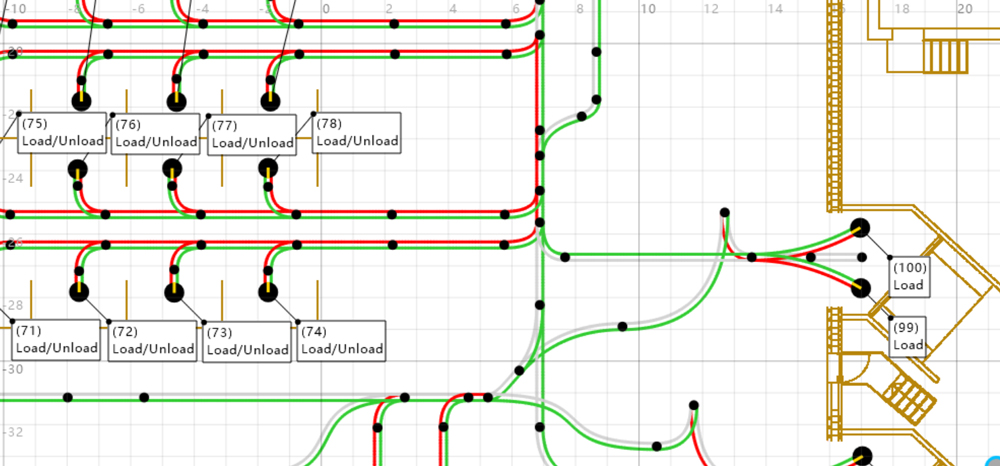
リソースベース搬送
フロア内で複数のAGVを使用している場合、被搬送物のタイプに応じて搬送可能なAGVにタスクが割り当てられます。在荷センサからの入力をトリガに使用することで搬送の自動化が容易に実現できます。
このほかにもMES, WMSやPLCなどの外部システムやモバイル端末から都度搬送指令を出すこともできます。Navithorではこれらの方法を組み合わせることで多様な搬送を自動化することが可能です。
タブレット用webユーザインタフェース
採用いただける車両メーカ様を募集中!
LINXではNavitecを採用いただける車両メーカ様を募集しています。積載型AGV、牽引タイプ、フォークリフトタイプなど様々なAGVに対応可能です。「これまで無軌道式AGVをやったことがないに」「高精度なAGVを実現したい」「大規模なAGV案件に対し、一から開発するのが難しい」といったお客様にぜひご検討いただければと思います。


