


- お客様: 半導体製造装置を開発されているお客様
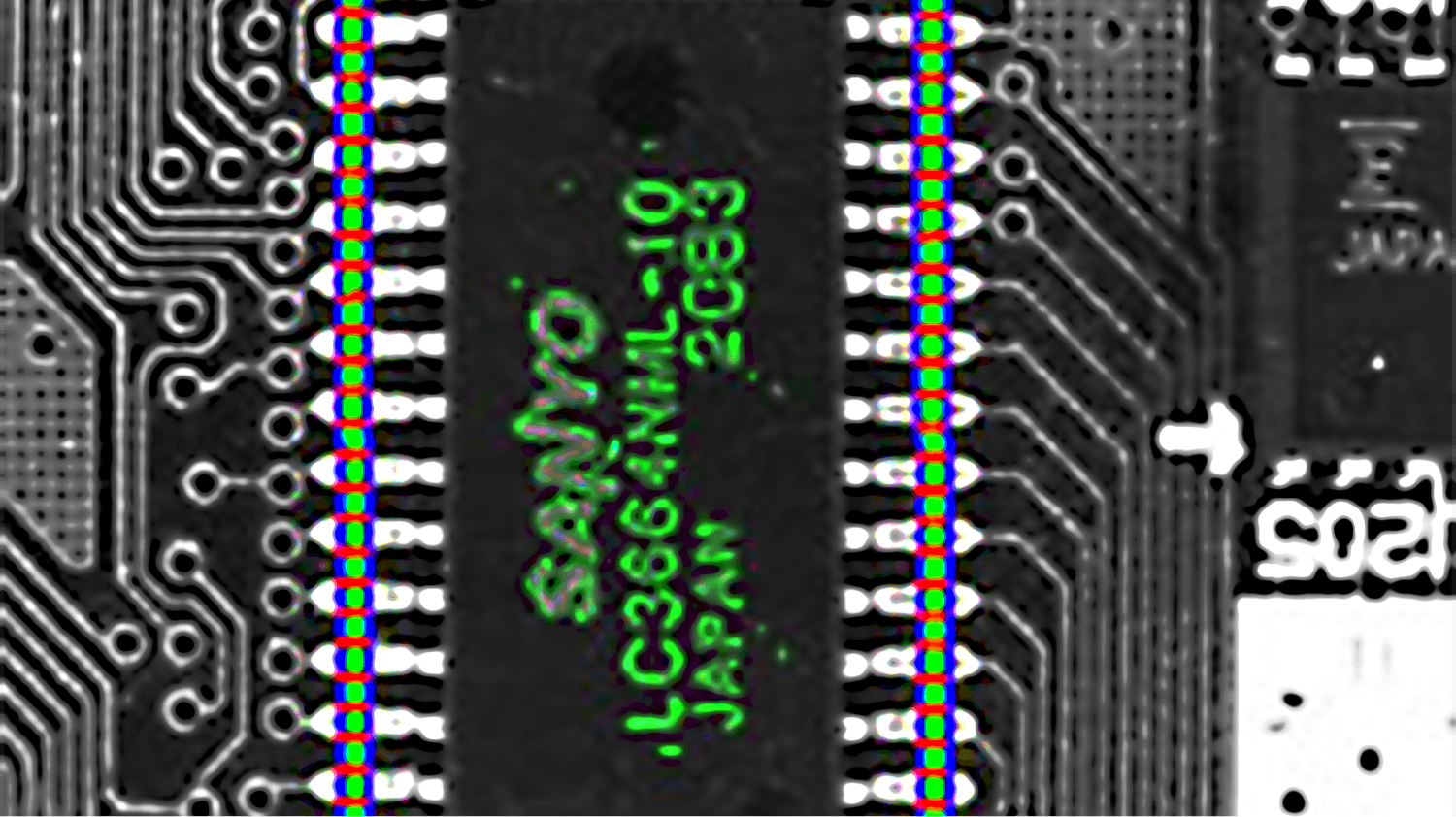
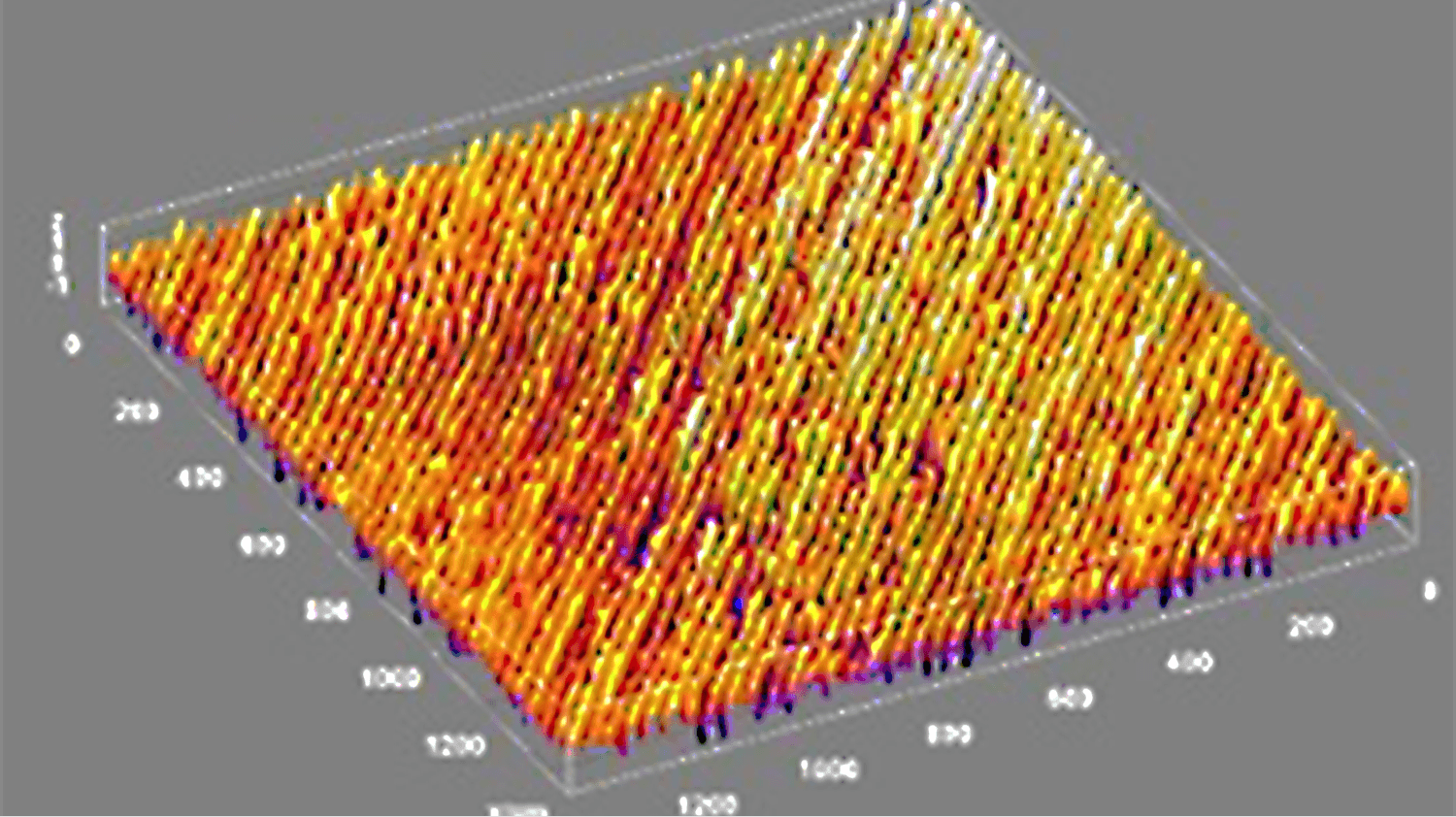
- アプリケーション: マスクパターンの光を転写時に生じる光学系の歪を検査
- 実現したこと: SoCベースの分散画像処理システムにより検査の速度と精度を向上
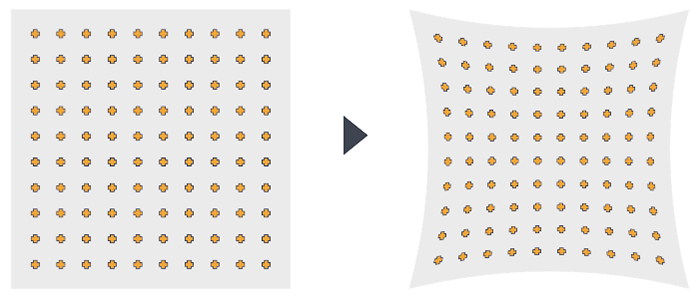
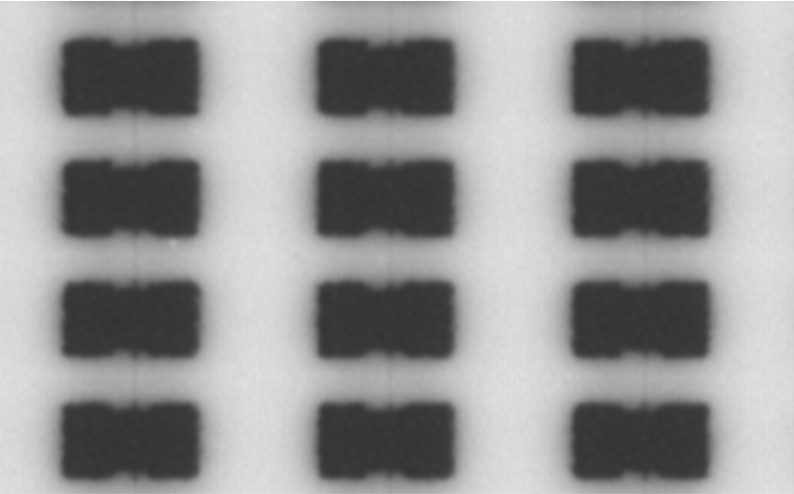
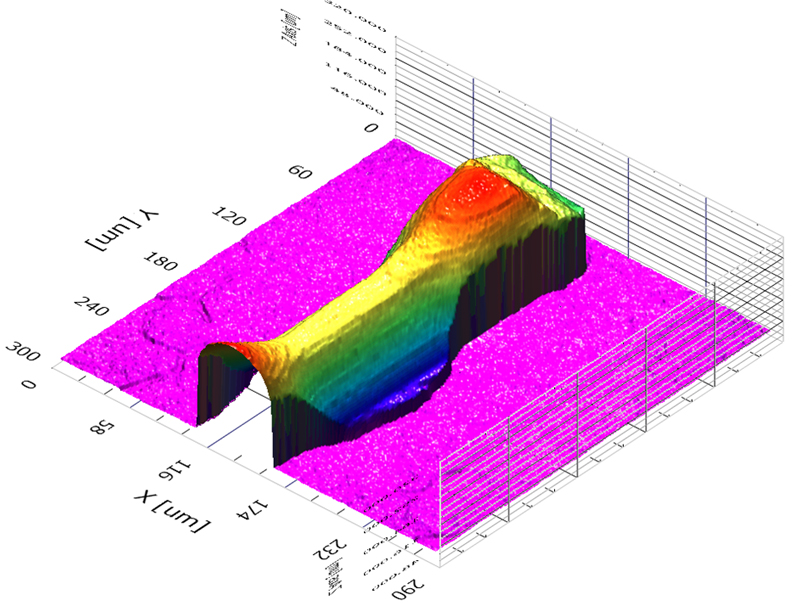
フォトマスクの歪の例
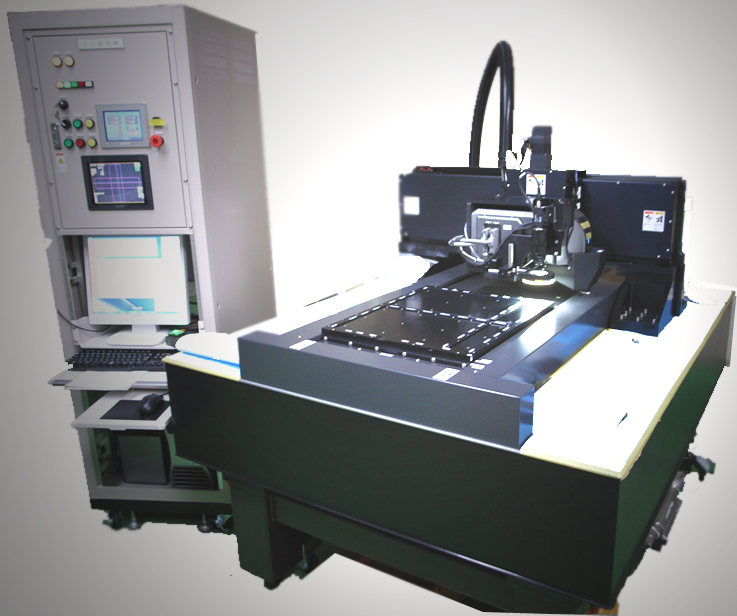
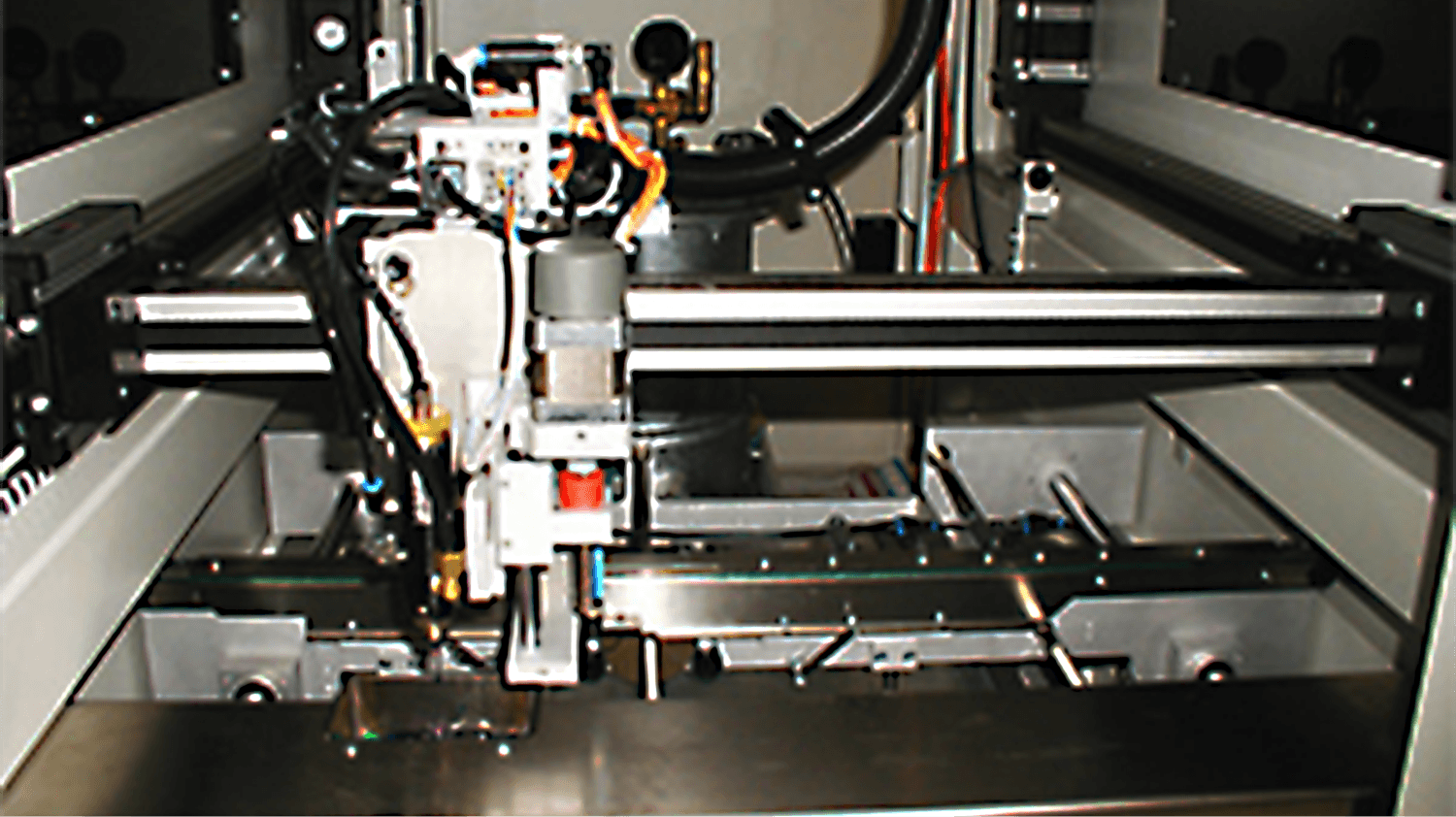
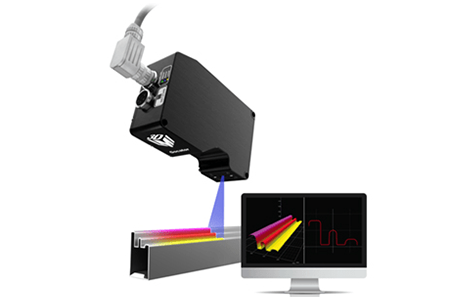
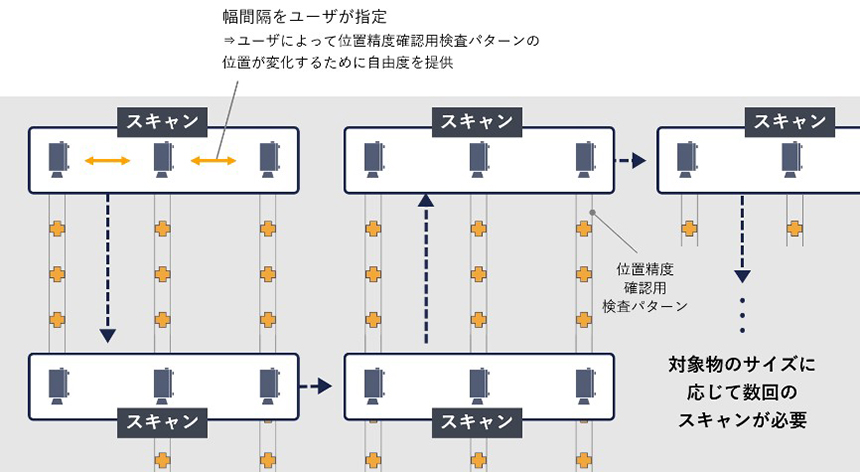
現行の装置システム概要
- 1台のPCに3台のBasler社製USB3カメラを搭載
- PCにて画像処理を行い、歪を検査
- 対象物のサイズに応じてスキャンを繰り返す
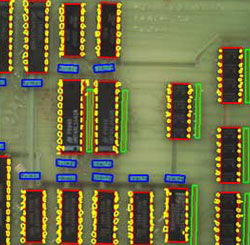
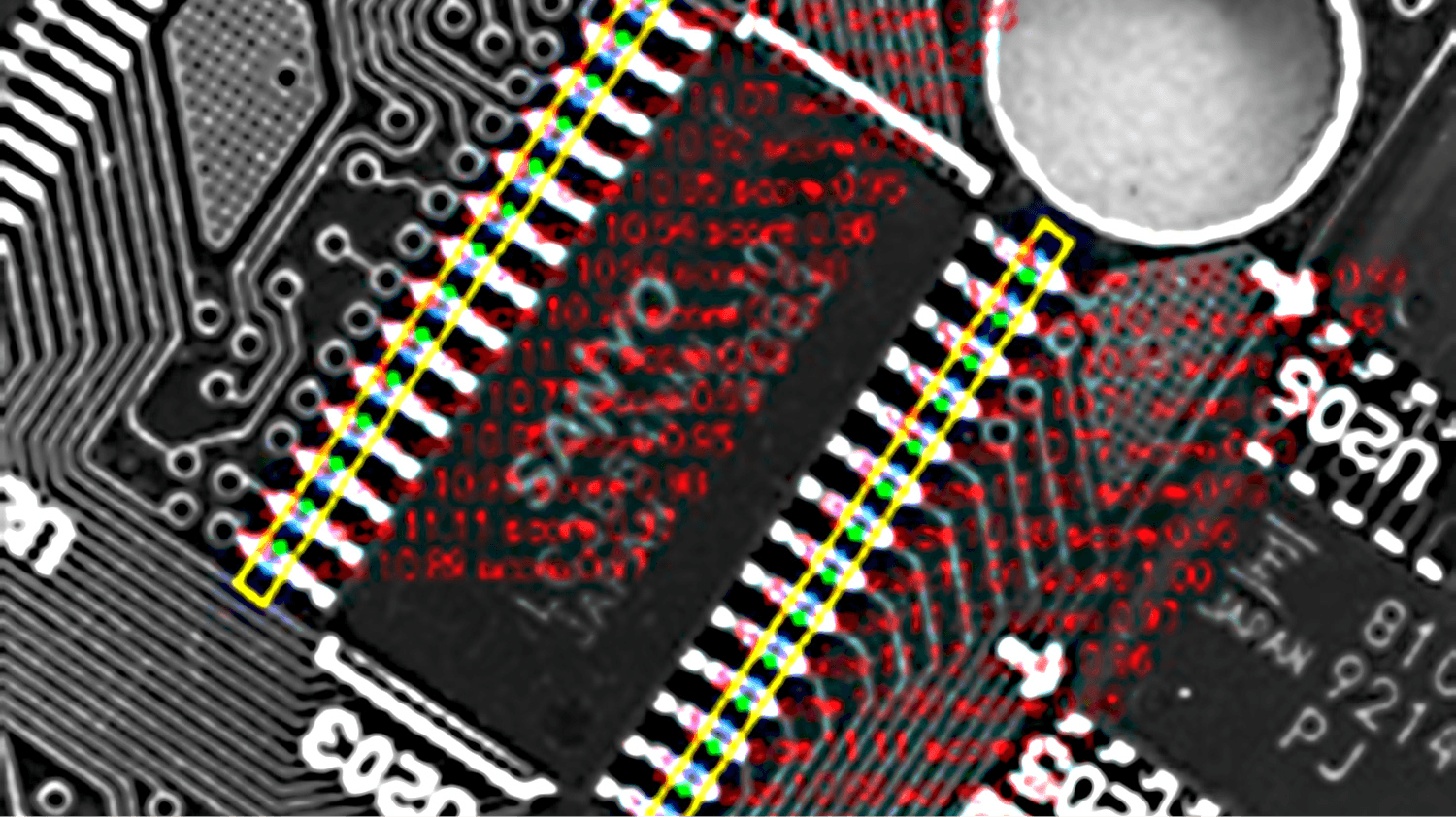
位置精度を確認するための検査パターンが用意されます。このパターンは顧客によって幅が変わるため、カメラとカメラの距離を変えられるように自由度を持たせています。連続的にカメラで撮像を行い、歪がどれだけ発生しているかを検査します。1度のスキャンではカバーできないため、対象物のサイズに応じて、スキャンを繰り返します。
現行装置システムの課題に対するチャレンジ
課題
- 顧客の要求する 「速度」・ 「精度」・ 「検査パターン位置の自由度」 は、毎年向上し続ける
今回新たに取り組んだ技術的チャレンジ
- 「速度」を向上させること
- 「精度」を向上させること
ただし、特定顧客向けとし、「検査パターンの位置」は固定
速度、精度、そして、検査パターン位置の自由度の3点に対する顧客からの要求は毎年上がり続けます。
この課題に対して、ある特定の顧客向けに限定して、新規システムの開発に着手しました。
特定顧客向けとすることで、検査パターンの位置は固定とすることができ、速度と精度の2点を向上させることに集中して取り組みました。
「速度」と「精度」を向上させた新規システム開発
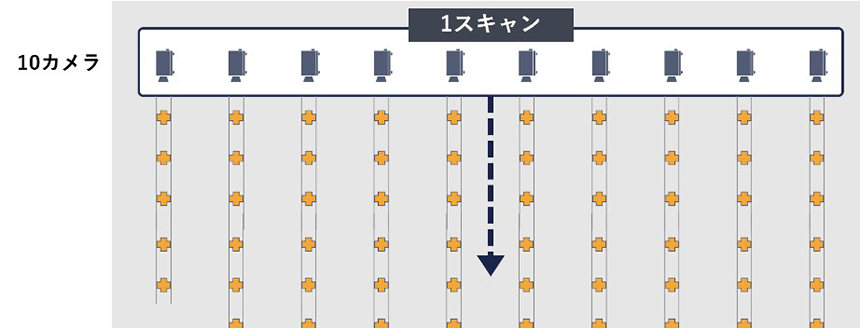
①【速度向上】カメラ接続台数を10台に増やすことで、1スキャンで完了
②【精度向上】カメラの解像度を上げた
速度の向上に関して、従来のシステムにおいては、複数回のスキャンを行う必要があったことが最大のボトルネックでした。
そこで、カメラの接続台数を3台から10台に増やします。これにより、スキャン回数を1回にすることができ、大幅な速度向上を実現できます。
また、精度の向上に関して、カメラの解像度を数メガピクセルから12メガピクセルに上げました。これにより、分解能が向上し、精度の向上を実現できます。
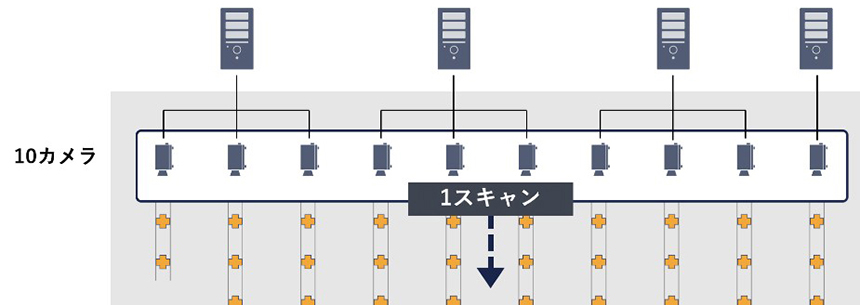
PCビジョンの限界
- 当装置の場合、PCに接続できるカメラは3台程度が限界
- カメラ10台を繋げるためにはPCが4台必要となり、コスト・サイズが合わない
しかしながら、ここでPCビジョンの限界に直面します。この①と②を実現するとなると、この装置の場合、1台のPCに接続できるカメラの台数は3台までが限界でした。
カメラ10台を接続するとなると、PCを4台並べる必要が出てきます。コストもサイズも合わない事態に陥ってしまいました。
エンベデッドビジョンソリューション
SoCベースの分散画像処理システムにより解決
- 分散画像処理システムで多カメラを実現
- コストを維持しながら画像処理性能を向上
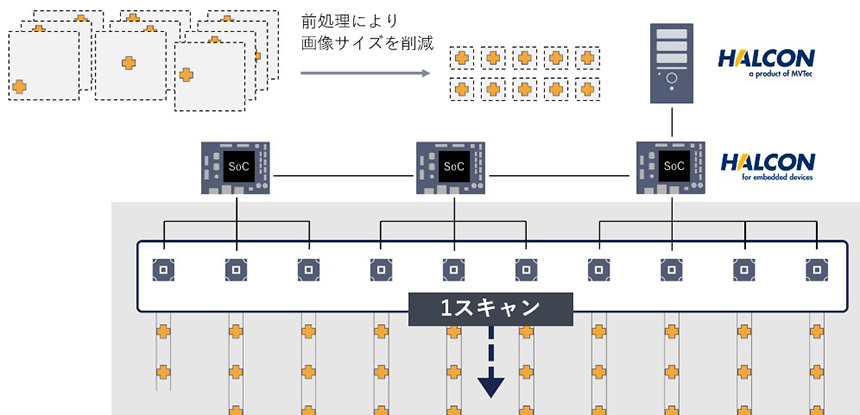
3〜4台の12メガピクセルのカメラをNVIDIA社製Jetsonに接続。Jetson上で、HALCON により、前処理を行います(HALCONはARM CPU+Linux環境に標準対応)。
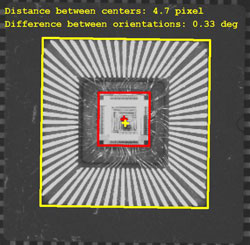
前処理では、12メガピクセルという大きな画像に対して、レンズの歪を補正した上で、パターンマッチングにより検査パターンの位置を精確に見つけます。
さらに、その検査パターンの部分に絞った小さな画像に切り取って、ホストPCに送ります。
そして、ホストPCでは、送られてきた画像群に対して、HALCONで後処理を行い、マスクパターンの光を転写時に生じる光学系の歪の検査を実施します。
このように、エンベデッドビジョンソリューションにより、コスト・サイズを維持しながら、「速度」と「精度」の向上を実現することができました。
SoCベースの分散画像処理システムが装置に新たな付加価値を生み出しました。