


近年,自動車の高性能化,高機能化を実現するために,さまざまな技術開発が活発に行われています。本田技術研究所殿では、カメラを用いた障害物への衝突回避を支援システムの開発において,画像処理統合開発環境HALCONを導入していただきました。
障害物検知アルゴリズムをHALCONの基本開発環境によって開発し,検知された障害物情報をCAN(Control Area Network)によってシャーシ制御デバイスへ送信する機能を拡張開発環境で実現しました。この事例では、上記システムの開発環境を紹介し,その導入効果を述べます。そして最後に、HALCONの他分野における活用方法について触れます。
HALCONは『Cインターフェース』と呼ばれる機能を有しており、ユーザ独自の関数をC言語によりHALCONへ追加することで、ユーザ固有のアルゴリズムを含めた統合開発環境を構築できます。また、HALCONの関数とユーザ独自の関数との間での画像情報等の受け渡しも、データ形式が公開されているため容易にプログラムできます。今回の本田技術研究所殿向けの開発でも、同様にCインターフェースを用いてCAN通信用の関数を開発しました。
●はじめに
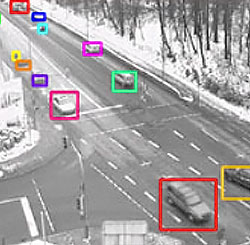
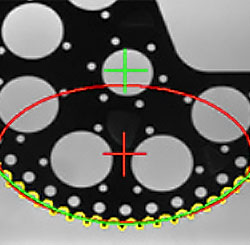
自動車の高性能化,高機能化のための技術開発の結果として,駐車支援(図1)や視界支援(図2)のような運転支援システムやナイトビジョン(図3),衝突被害軽減システム,乗員状態検知システムのような安全システムなどが先進的な装備として商品化されつつあります。
これらのシステムにおいて共通していることは,センシングデバイスとしてカメラを用いていることです。つまり,運転支援や安全システムにおいて,カメラは重要なセンシングデバイスで,いかにカメラの信号からシステムの性能を向上させるための情報を引き出すための画像処理技術が重要になってきます。このように,自動車に搭載する先進装置の研究開発において,画像処理技術に対する期待が今後,さらに高まっていくと予想されています。
一方,ドライバーが行なう運転操作を支援する機能を持つ支援システム(例えば,車線維持支援システム(図4)など)では,ステアリングやブレーキなどシャーシ制御デバイスをアクチュエータとして用いることが一般的で,これらのデバイスとして,電動パワーステアリングや車両運動安定化システムなどがあります。最近では,これら個々のデバイスがネットワークによって繋がり,さまざまな車両情報を相互に通信できる環境も整ってきており,通信速度の速い車載ネットワークとしてCAN(Control Area Network)が標準的に使われるようになってきました。したがって,運転操作支援システムを構成する手段として,カメラを用いて車両周辺の外界情報(例えば,近接障害物)を検知し,このカメラから得られた信号に対して画像処理した情報をCAN経由でシャーシ制御ユニットに送信するシステム構成が最も効率的であると言えます。●画像処理システムの概要
(1) システム構成
近接障害物を認識するための車載型画像処理システムのハードウエア構成を図5に示します。画像処理ユニットにはLeutorn社製の小型PC「LVmPC」を用います。「LVmPC」は画像入力ボード「Pic-Port」シリーズを内部に搭載しています。また,画像処理ソフトウエアとして、MvTec社製「HALCON」を用います。シャーシ制御デバイスのような車載システムとのデータ通信は、今回開発したCAN通信機能を使用しました。なお,CANのプラットホーム部分はVector社製CANカードおよびデバイスドライバで構成しています。
続いて,本システムの機能を簡単に説明します。まず,CCDカメラから得られた画像信号(NTSC)をPic-Portにより取り込み、その後,LVmPCにて画像処理を行います。処理結果は、CANを介して車載デバイスへと送信されます。また,画像処理を起動させるために必要なトリガ信号や画像処理を行うために必要な車体の情報等は、CANを介して車載デバイスからLVmPCに入力されます。
(2) 導入効果の検証ポイント
カメラ信号を処理するための基本アルゴリズムの大部分は、HALCONを用いて開発しました。画像処理アルゴリズムの開発フェーズを,「基本仕様検討」→「コーディング」→「実装」→「実車テスト」と区分けし、それぞれのフェーズにおいてHALCONの導入効果を検証することにします。
今回の画像処理による検出対象物が、「車両に接触する可能性のある障害物」ということで非常に多様であるため、網羅的に多数のアルゴリズムを作成し,画像処理結果の妥当性を判断することによって最終的なアルゴリズムへと絞り込む開発手法をとっています。したがって,画像処理開発ツールとしてHALCON導入効果の基準として,“いかに多数の画像処理アルゴリズムを効率よく開発できるのか”,という点と“画像処理した結果の妥当性を実車レベルで迅速に検証できるのか”,という点を画像処理ツールとしてのHALCON導入効果の基準として設定しました。
●効果の検証
ここでは,車両周辺の障害物検知アルゴリズムの開発をテストケースとして,HALCONの導入によって実現できたこと,さらに期待される効果を述べます。
(1) 基本仕様の検討段階
画像処理アルゴリズムの基本仕様検討及び作成のために,まず簡単な開発用GUIを作成し、追加/変更/削除などの処理した画像を随時確認できる環境を整えることを検討しました。この環境構築には,非常に多くの開発時間が必要とされることが予想されたのですが,HALCONには、このような開発環境を整えるために必要とされる非常に強力な開発インターフェース機能がありました。
その一つとして、中間処理画像を随時ウォッチできる機能(Variable Watch)が挙げられますが,この機能を利用することにより、処理の追加/変更/削除の結果を適時確認しながら開発を進めることができ、画像処理アルゴリズムの妥当性を検討段階で検証できるため,後戻りがほとんどない効率的な検討ができ,開発工数を半減することができました。
HALCONの専用インターフェースは、C言語等のプログラミングに比較し、入力コマンドが極力少なく済むように体系化されており、この点でも開発効率の大幅向上に貢献できたと考えています。実際、今回の開発検討中に、ある特定の処理に特化した簡単なテストプログラムを100以上作成しましたが、従来のC言語等でのプログラミングでは、この半分も試作できませんでした。以上の点から,導入効果のポイントである網羅的な案別仕様に対するアルゴリズムの妥当性検証を効率的にできるようになりました。
以上の結果より,導入効果の評価基準である“いかに多数の画像処理アルゴリズムを効率よく開発できるのか”という点を十分満足することを確認できました。(2) コーディング/実装段階
HALCONの機能の一つとして、C、C++へのエクスポート機能があります。これは,HALCONで開発した画像アルゴリズムをCプログラムに変換し,コンパイル/リンクすることで,実行形式のプログラムを簡単に生成でき,LVmPCに実装できる機能です。この機能は,自動コード生成機能であるため,コーディング作業工数を大幅に削減できることが検証できましたが,それ以上に,処理速度に関する制約がある場合には,このようなエクスポート機能が非常に有効であることが確認できました。
(3) 実車テスト段階
HALCONのCANインターフェース機能が追加されたことによって,作成した画像処理アルゴリズムの評価とシャーシ制御デバイスも機能させることで,システム全体の評価を実車レベルで検証することが,直ちにできるようになりました。このように,机上での検討段階から実車でのアルゴリズムの妥当性、ロバスト性を検証するという手順をシームレスに行える開発プロセスが確立できました。その結果,導入効果の評価基準である“画像処理した結果の妥当性を実車レベルで迅速に検証できるのか”,という点を十分満足できることを確認できました。
(4) 期待される効果
カメラを用いた近接障害物検知アルゴリズムの開発について,まだ十分に検証されていませんが,HALCONの導入によって期待される効果を挙げます。
① 中間処理画像を随時ウォッチできる機能や簡略化されたコマンド入力体系により画像処理アルゴリズムを非常に早く作成できることから、従来よりも「作成」→「検証」→「修正」といった開発ループを何度も回すことができ、短期間で基本アルゴリズムの完成度を上げていくことができました。このように,開発効率だけではなく,開発初期段階において画像処理アルゴリズムの熟成を行なえるため,システム性能の達成レベルを精度よく予測できるようになったことから仕様品質の向上にも効果があると予想されます。
② CANインターフェース機能の追加により,既存の車載デバイスとの連携が簡単に実現できるようになったため,画像処理アルゴリズム開発から実車性能評価までの開発フェーズをシームレスに統合する環境が構築できました。これによって,実車における性能達成レベルを短期間で予測できることが期待されます。
また,特筆すべき点として、HALCONのライブラリは随時更新されており、検討してみたい処理が、HALCONでサポートしていない、ということが全くありませんでした。実装作業時に必要なライブラリ環境の評価は,まだ十分に行なっていませんが,基本仕様の検討段階に用いる基本アルゴリズム構築のために必要となる機能は、ほぼ一通り関数として揃っているため、不自由を感じることはありませんでした。
●他分野におよぶ豊富な処理機能
自動車制御のセンサーとして画像処理が注目を浴びてきていますが、品質管理の面においても画像処理が不可欠なテクノロジーとなっています。自動車としての品質管理を行う場合、様々なセンサー(温度、圧力、パルス等)からの情報を、データロガー等を用いて計測することにより検証を行いますが、計器パネルの点灯状況やミラーの角度など、ビジョンを用いて計測しなければならない項目も多々あります。また、これらのビジョン情報を各種センサーと同期して計測する必要がありますが、最近では各種センサー情報をCANベースで取得することができるシステム(例:imc-C1、CRONOS-PL7)など)があり、それらと今回開発したHALCONのCANインターフェースを組み合わせることで実現が可能となります。