



ITSにおける自動車分野では、画像センサによる前方車両との衝突防止などの実用化システムが報告されています。
一方、鉄道における走行中の前方安全確認は、自動列車停止装置などの保安設備はあるものの、基本的に運転士の目視により行われています。ところが夜間、濃霧、降雪といった視界不良時は十分な目視確認ができない上、ヒューマンエラーによる安全性の低下といった懸念もあります。そこで、鉄道総合技術研究所では車上搭載型マシンビジョンによる列車前方監視システムの研究開発を進めています。その中から、図1に示す信号標識の自動認識への応用について紹介します。
●自動認識システムに対する要求
装置に対する要件は、一般的な車両の運転台に搭載するため、カメラ、画像処理部などをコンパクトな筺体に実装すること、検知したことを運転士にアラーム出力する手段を備えることです。また言うまでもなくオンライン実時間処理が必須となります。処理速度に関していうと、列車の速度を100km/hとした場合、毎秒約27.8m進むことになります。進行方向の処理間隔のピッチを最大3mとし、列車速度を勘案して計算すると約0.108sとなります。カメラのフレームレートを30~15fpsとして、処理速度100ms以内を目標に画像処理アルゴリズムの検討を行いました。
鉄道の安全運行に係わる運転保安システムには、高い信頼性が求められます。認識率でいえば、限りなく100%に近い数字ということになります。認識率100%をめざして開発を進めますが、当面は運転士の支援システムという位置づけで考えています。
鉄道は自動車と違って、ブレーキをかけてから車両が停止するまでのいわゆるブレーキ距難が非常に長いという特徴があります。そのため遠方においてもある程度の画像解像度が必要となります。手法としては望遠レンズを使用する、撮影解像度の高いカメラを使用するなどが考えられます。ただし前者では映像ブレが起きやすくなること、後者では処理時間が増加すること等の課題があり、十分な検討が必要となります。
●自動認識システムの概要
画像認識アルゴリズムはHALCONを用いて開発し、画像入力および認識処理には高性能カメラと高速プロセッサを一体型のコンパクトな筐体に収めたeXciteを採用しました。基本的にカメラと小型モニタ(アラーム出力装置)のみを搭載し、映像記録装置は必要に応じて使用します。列車の進行と共にターゲットである信号標識の見かけ上の大きさが変化する上、車両動揺に伴う画像ブレも考えられるので、対象の存在位置や角度、スケール変化にロバストな形状ベースパターンマッチングを適用します。マッチング用モデルの登録を図2に、認識処理の流れを図3に示します。
●画像処理アルゴリズムの概要と検出結果
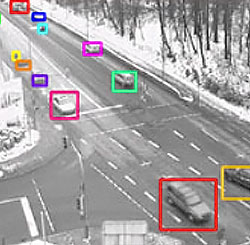
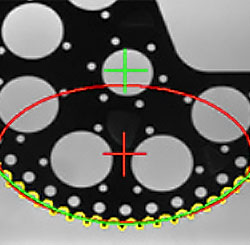
マッチングパラメータとして、対象の回転については垂直に対し±5度、スケール変化については登録テンプレートに対して0.7~1.3を観測範囲としました。スコアについては0〜1.0に正規化したものを用い、認識結果としてテンプレートとの合致度がスコアとして得られるので、これを閾値処理により抽出しました(図4)。処理の高速化に関しては次のような手法を適用しました。画像を階層的に縮小した解像度ピラミッドの考えを適用し、粗い解像度でおおよその位置を決定し、探索範囲の絞り込みを行いました。さらに自分の走行するレールを検出した上で、レール幅が1,067mmであるという知識を利用し、前方距離に応じて観察されるテンプレートの大きさを動的に推定することで、スケールに関して探索時間の短縮を図りました(図5)。また最初に認識した信号標識の位置を記憶し、当該位置が連続するフレームでも検出された場合は確度が高いと判断する、状態遷移の考え方を導入することで検出の信頼性向上を図りました(図6、図7)。
●まとめと今後の予定
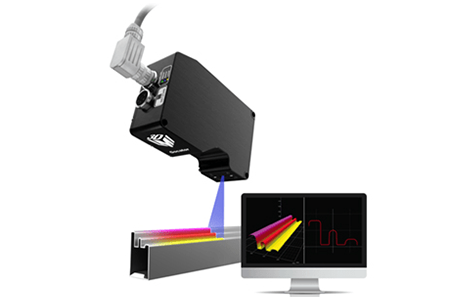
インテリジェントカメラを適用した車上搭載型マシンビジョンシステムについて、信号標識の自動認識について報告しました。開発した認識プログラムを用いて検証試験を行った結果、昼間から夕方にかけての映像に対して、すべてのシーンで信号標識を、十分な精度と実用的な処理時間で検出できていることを確認しました。さらに信号標識に速度制限の数字がある場合には、文字認識技術により、制限速度の読み取りも行いました(図8)。車載カメラなどのシステムイメージを図9に示します。今回撮影した環境条件では信号機の検出漏れはなく、良好な結果が得られましたが、今後、夜間・雨天・降雪・濃霧などの様々な環境下で得られる映像に対して、検知性能の評価とシステムの改良を行う予定です。