



移動物体を検出したいという需要はかなり多く、想定する環境も様々です。このような要求に対して、固定式カメラの場合、フレーム差分または背景差分による二値化が基本的な手法となります。しかし、フレーム差分では物体が一時停止すると差がなくなることから何も検出されなくなり、背景差分では、背景の生成・更新方法が問題となります。
HALCON には移動領域を検出するオペレータがあります。これは背景差分法に基づいており、背景画像の更新にはカルマンフィルタに基づいたロバストな背景推定機能を使用しています。撮影環境や目的に応じたパラメータを設定することが可能です。

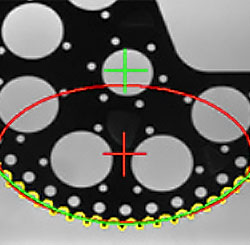
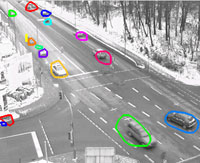
この背景推定と移動物体検出の例題では、固定式カメラから得られるビデオストリームを処理し、移動物体部分のみを抽出します。屋外での撮影であるため、時刻と共に環境が変化しますので、環境の変化に対応した移動物体の検出を考える必要があります。ある時刻tにおける画像が左図のような場合を例にします。

前回の時刻t-1の時に計算された結果を元に、現時点での背景を推定し、前景(動領域)を求めます。赤い部分が移動物体として認識された部分です。
連結成分を求めます。

領域を膨張させた後、反転させ、次回のための背景として登録します。画面上、楕円の外側が背景領域となります。

移動体として検出された前景を囲う最小の四角形にて枠を表示します。
これら領域をXY座標で取得することも、四角形の枠内や楕円の面積を取得することももちろん可能です。
以上を繰り返すことにより、移動体を正しく認識することが可能です。
様々な移動体追跡の例です。