


自動車分野では、ホイールの寸法計測、自動運転のための白線認識、車番認識を始めとしたさまざまなアプリケーションがHALCONを利用して作られています。多種多用なHALCONオペレータを組み合わせることにより、リアルタイム性を考慮したアプリケーション開発を可能にします。

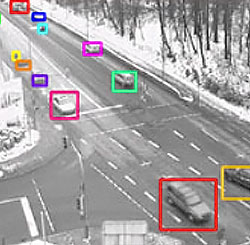
ここでは、自動運転のための白線認識を考えます。この場合、カメラから取り込んだ画像を次の画像が得られるまでに処理を完了する、といったリアルタイム性が要求されます。そのため、画像全体から白線を探すというアプローチではなく、粗探索という手法を用いて高速に白線を検出します。
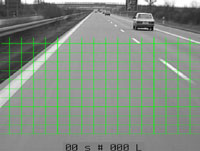
白線を検索する対象領域をグリッド状に指定します。HALCONではこのようなグリッド領域を作成することも簡単にできます。上部は空や木々などがあるため、対象領域からはずし、少し手前を見るようにしています。
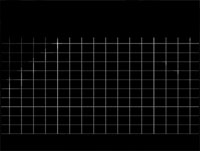
元画像とグリッド領域でマスクし、グリッド領域状の画像のみを取得します。これを対象領域とし、粗探索を行い準備を行います。
この範囲内で2値化処理を行い、白い部分を取り出します。結果として、グリッド領域上の白線部分が抽出されたことになります。

2値化処理によって得られた領域を膨張させます。ここを白線検出のための対象領域とします。以上で粗探索が終わりました。
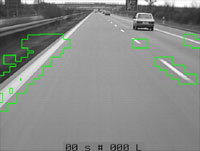
対象領域と白線の関係は左図の通りです。この中から白線を見つける問題は至って簡単です。

対象領域のみに画像を絞り込み、2値化処理を行います。結果として見事白線を抽出できました。この領域を矩形近似すれば、白線の方向などの情報を取得できます。