


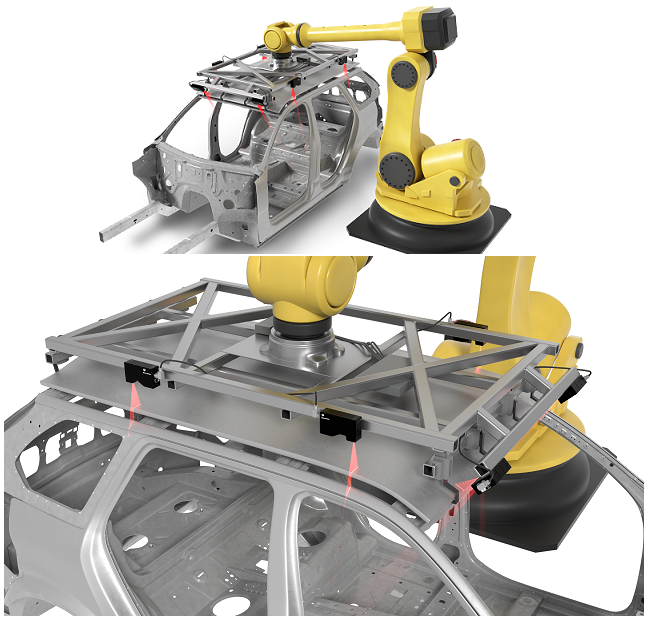
ロボットによる自動車のルーフパネル建付けをGocatorを使用して3次元座標でガイダンスする事例です。
自動車パネルを人手で取り付ける作業は労働集約的であり、不正確かつ組立作業者にとっては安全上のリスクにもつながります。
またロボットでパネルを取り付ける場合も、取付操作が複雑であることと車体の位置が正確ではないため、常に位置変動を確認しながら操作する必要があります。このようにパネルの位置を最適化するためビジョンガイダンスが必要となります。
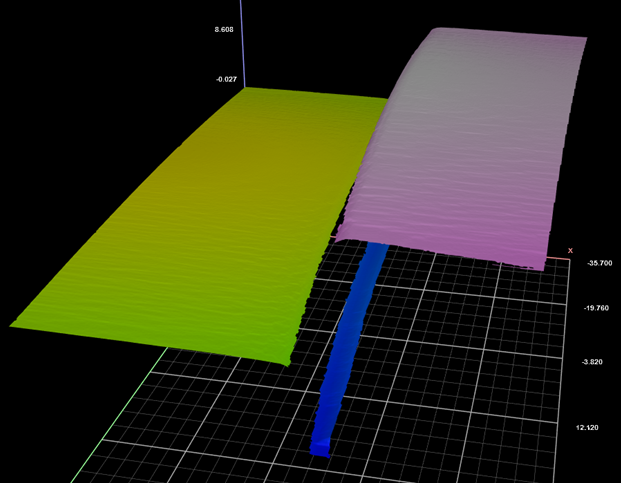
4台のGocator2300シリーズをパネルの4隅が映るよう配置し、Gocator内蔵の計測ツールでエッジを計測しながらパネルエッジの段差・隙間を計測し続けロボットへ送信することで、リアルタイムに3次元で位置の特定を可能としました。