






優れたコストパフォーマンスと
最適化されたソフトウェアが、
さらにスマートな物流を実現する。

オープンなプラットフォームでユーザーでも作り込み可能
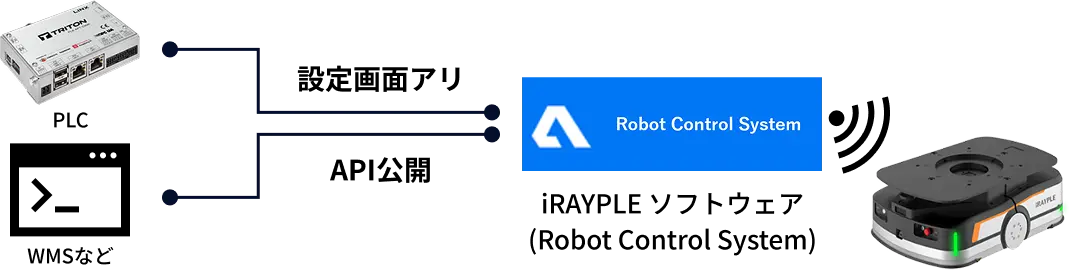
PLCとの通信インターフェースや
APIベースでの通信など、
幅広いインターフェースを提供。
最大500台のフリートコントロール。ありとあらゆる場所の群制御もソフトウェア1台で
1工場ソフトウェア1台。
シンプルな構成で
高いコストパーフォーマンスを発揮。
PLCとの通信インターフェースや
APIベースでの通信など、
幅広いインターフェースを提供。
1工場ソフトウェア1台。
シンプルな構成で
高いコストパーフォーマンスを発揮。