




AMR走行性能

AMRの走行可能な環境
段差10mm
溝20mm
傾斜3°
段差10mm、溝20mm、傾斜3°までの環境で安定的に走行します。
AMRが走行可能か、弊社で確認も可能ですのでお気軽にお問い合わせください。
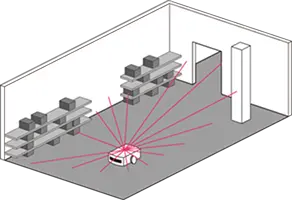
前進・後退・カーブ・スピンターンも可能
iRAYPLEのAMRは前進、後退、曲線走行、スピンターンなど様々な走行が可能です。
狭い通路の走行や倉庫などの広い環境での走行など、様々なエリアで柔軟に走行可能です。
また、曲線走行の実現により、スピンターンと比較して速度を落とすこと無く右左折ができますので、タクトタイムの削減にも貢献します。
SLAM/コード/テクスチャの3種類を切り替えながら走行可能
SLAM
周囲の環境情報をベースに
自己位置推定しながら走行コード
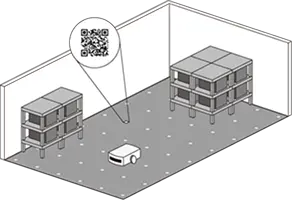
特定の位置にあるコードで自身の
位置を認識しながら走行テクスチャ
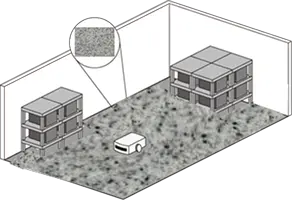
床面のテクスチャをベースに
自身の位置を認識しながら走行
停止位置精度とメンテナンス性はトレードオフになりがちです。
このトレードオフを解消するために、iRAYPLEはハイブリッドナビゲーションという1つの解をご提供します。
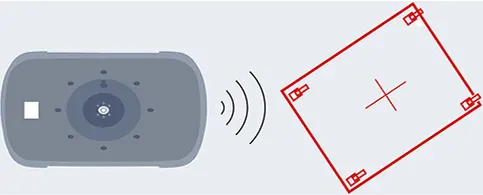
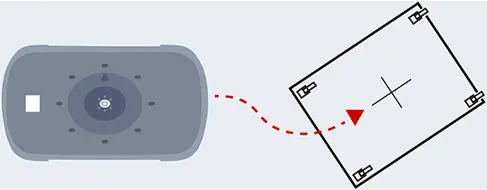
棚位置の自動ズレ補正
AMRに搭載しているLiDARセンサーとToFカメラにより、棚の位置ズレを検知し、潜り込む角度を自動調整ができます。作業員が台車を置き、AMRが搬送するアプリケーションで高い効果を発揮します。
調整可能な角度や距離など、ご不明点あればお気軽にお問い合わせください。
Step1:あるべき棚の登録
Step2:LiDARで棚脚を検知
Step3:マッチング
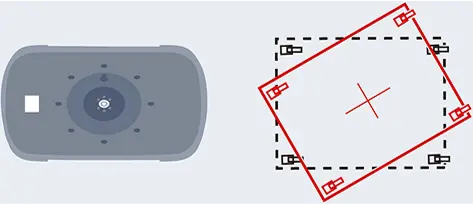
Step4:補正
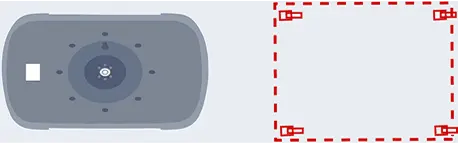
LiDAR + ToFカメラにより、小さな障害物もしっかり検出
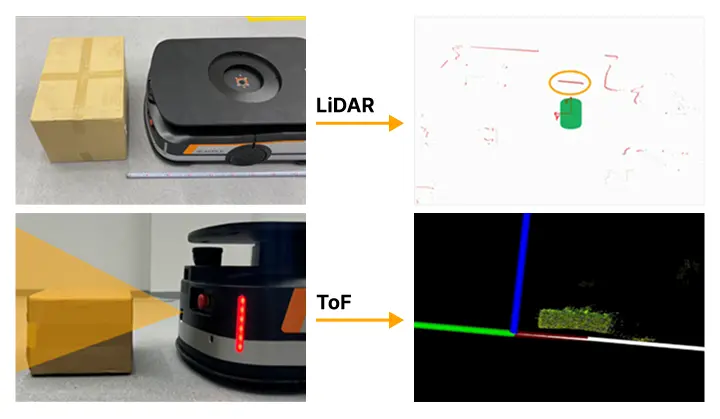
LiDARとToFの2段構造により、大小様々な障害物を検知可能です。完全無人エリアを作ることが難しい日本において、安全性の高い車両は非常に重要です。もちろん、前方・後方にも標準で搭載(※)しているため、効率的な向きで走行ができます。
※ 軽量可搬モデルを除く
障害物検知時の停止距離もユーザーで変更可能

100mmに
設定した場合

50mmに
設定した場合
障害物回避/リルートもユーザーで選択可能
障害物回避とリルートの両方をサポートしており、ルート毎に選択が可能です。
リルート
リルートは、あくまでも設計したルートの上で経路を再計算します。
障害物検知時は、障害物の前で一時停止した後、ルートを再計算してから走行をします。予測外の動作を防ぎたい場合には、リルートをお使いください。
回避
障害物回避は、障害物にぶつからない範囲で逃げるような挙動です。
障害物検知時に、障害物の幅を計算し、最短距離で回避することが可能です。
SLAM走行時の自己位置推定精度
環境変化50%まで対応可能
SLAMナビゲーションは周囲の壁情報を使用して自己位置を推定します。最初にマップを作成したタイミングと、50%の変化量までは許容します。それ未満であっても特徴的な場所が存在すれば自己位置を推定することも可能です。
動作に応じたAMR保護ゾーンの自動調整
自身の状態(停止、移動)と搬送中の棚のサイズによって、自身の保護ゾーンを自動調整します。
AMRに搭載されたコードリーダにて棚裏のコードを読み取り、
データベースからサイズ情報を取得して、保護ゾーンの切り替えを行います。
停止状態
AMR単独走行
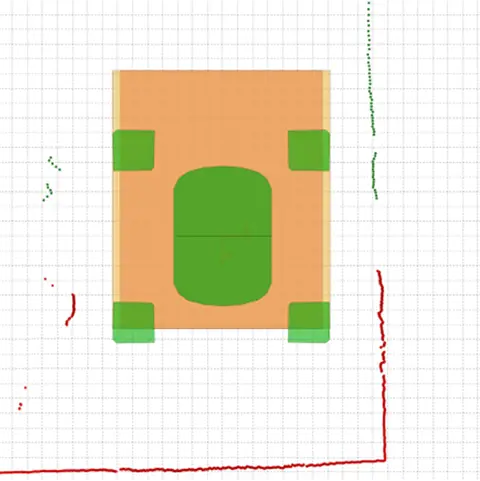
棚搬送中