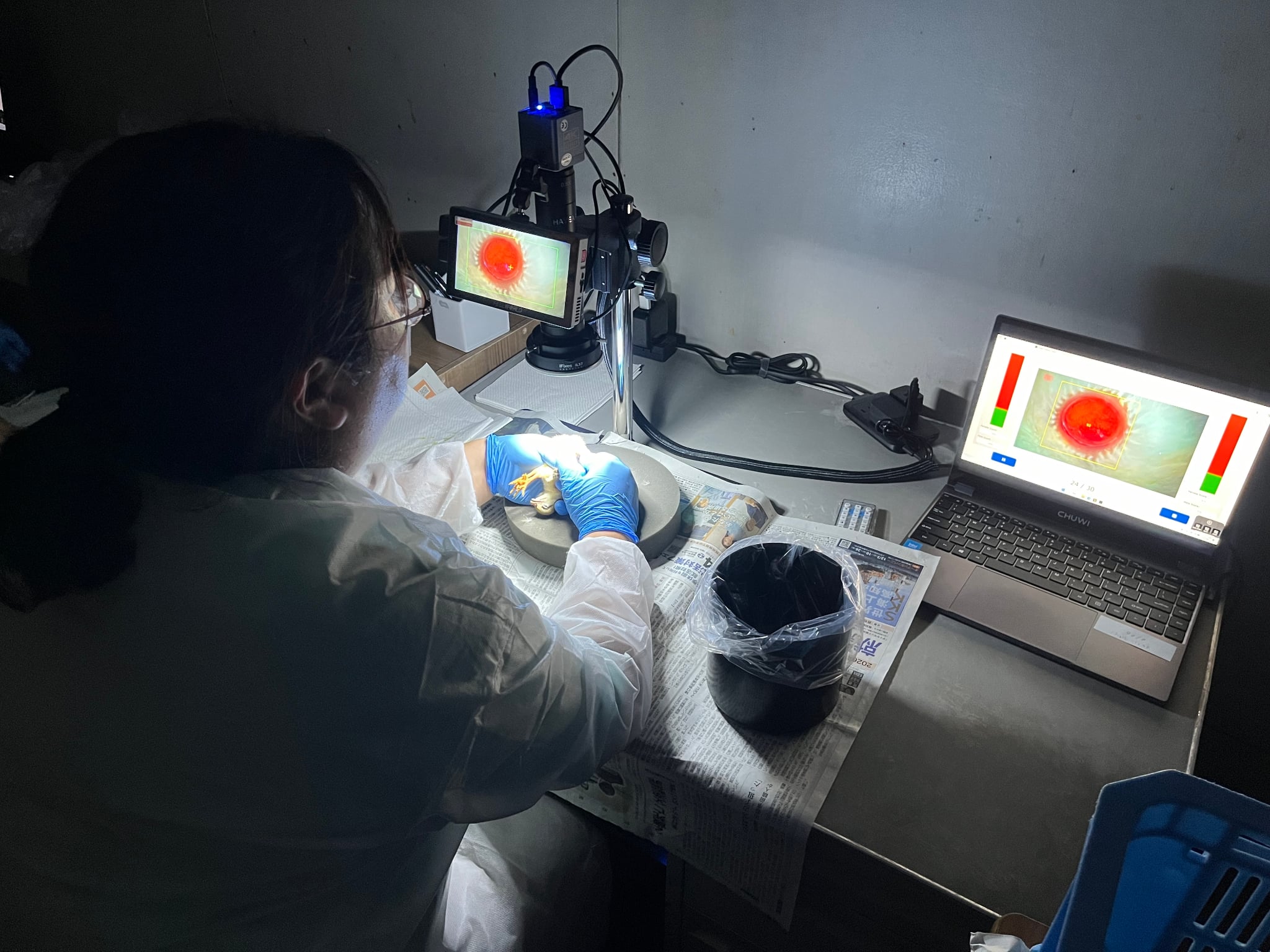



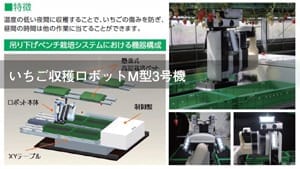
いちご収穫ロボットは農林水産省「次世代農業機械等緊急開発事業」にて、前川製作所殿と(独)農研機構/生研センターおよび早稲田大学が共同で開発したロボットシステム。直接果実に触れることなくHALCONの画像処理によりいちごの位置検出および収穫適期の判断を行い、専用マニピュレータにより果実を傷めることのない収穫を可能としています。夜間の収穫作業の軽労化・自動化を実現すべく、実稼動を意識したシステムデザイン、システムコストの削減、運用方法の確立に取り組まれています。
2015.11.28
いちご収穫ロボットは農林水産省「次世代農業機械等緊急開発事業」にて、前川製作所殿と(独)農研機構/生研センターおよび早稲田大学が共同で開発したロボットシステム。直接果実に触れることなくHALCONの画像処理によりいちごの位置検出および収穫適期の判断を行い、専用マニピュレータにより果実を傷めることのない収穫を可能としています。夜間の収穫作業の軽労化・自動化を実現すべく、実稼動を意識したシステムデザイン、システムコストの削減、運用方法の確立に取り組まれています。
![]()