|

独自のレーザー縞投影技術により、高解像度・広視野・高速fpsを並立する、産業用3次元スキャナです。
ロボットとの組み合わせでピック&プレースに使用できる他、外観検査や識別・計測など、幅広いマシンビジョン用途に活用いただけます。

■
ラインナップ
XS~XLまで合計5種類をラインナップ。視野に合わせて最適なモデルを自由に選択することが可能です。



3次元ロボットピッキングにおいて、画像処理はあくまでも機能の一部でしかありません。
産業用ロボットが的確に、ビン(パレット)の中でバラバラに置かれた(あるいは並べられた)対象物をピッキングするには、非常に多くの要素を考慮する必要があります。
スキャンした3次元データから、対象物の位置姿勢を求めるまでが画像処理です。
それだけでなく、位置姿勢情報のロボット座標系への座標変換、把持位置の設定、最適なアームの軌道計算、周囲の障害物との衝突回避、グリッパーの制御、ピッキングした対象物の置き方など、計算すべき要素は多岐に渡ります。
Photoneo社の「Bin Picking Studio」は、これらの計算を一括して行う統合パッケージ製品です。ピッキングのために面倒なロボットへの教示はもう必要ありません。ロボットと接続さえすれば、画面の指示に従って設定していくだけですべての要素を考慮したロボットピッキングシステムが完成します。
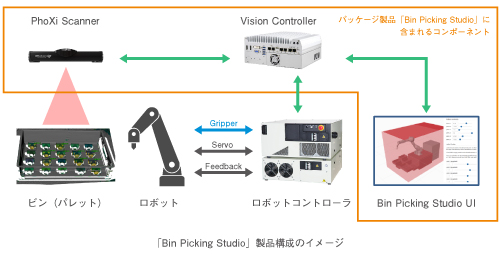

独自設計により、高解像度、深い被写界深度、高fpsで3次元データを出力する「PhoXi Scanner」。
5つのラインナップから、視野に合わせて最適なモデルを選択できます。詳しい製品説明はこちら。

一般的にロボットでのピッキングシステムは、数日かけて教示やテストを行われることがありますが、CADを使用した把持位置設定など、本製品のユーザーインターフェースを利用することで画面クリックだけで設定を完了することができます。
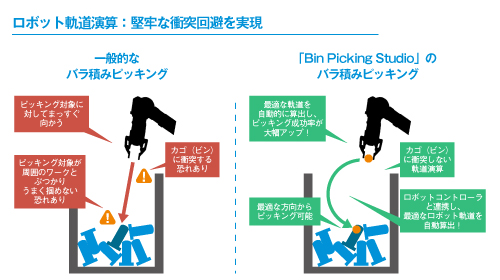
Vision Controller内で逆運動学(インバースキネマティクス)の計算を行うことで、ピッキングに最適なロボットアームの軌道を自動計算します。
既存手法ではピッキングが困難だった環境でも、堅牢なピッキングシステムを構築可能!
|