|
Navitrolは自己位置推定だけでなくモータ制御を兼ね備えたソフトウェアです。自己位置推定するだけではなく、駆動・ステアリング用のモータを制御することで安定した走行、高精度な位置決めが可能なガイドレスAGVを実現できます。今回はそのモータ制御機能の2つの活用方法をご紹介します。
|
|
PLC経由で駆動モータを制御!ベクタードライブ方式
|
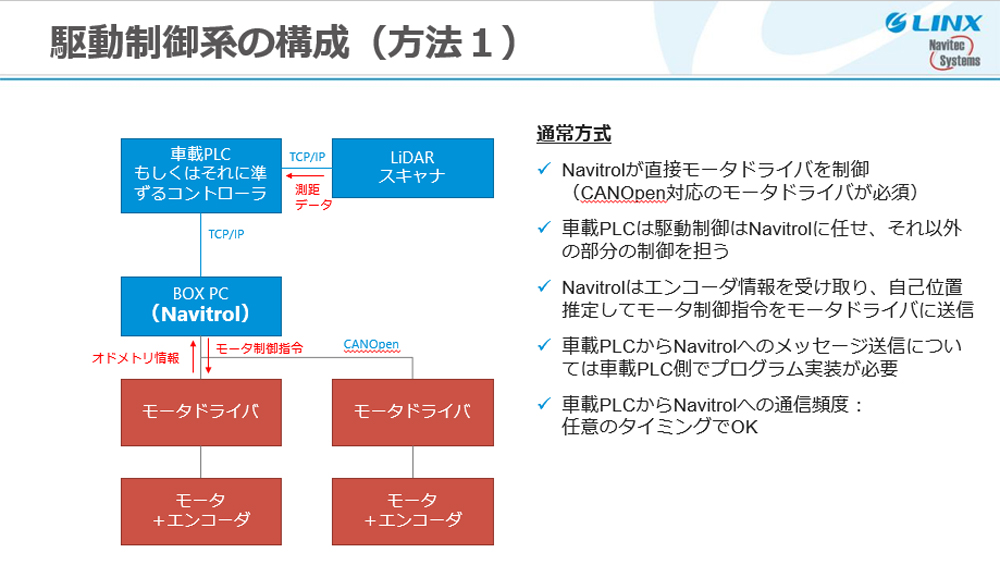
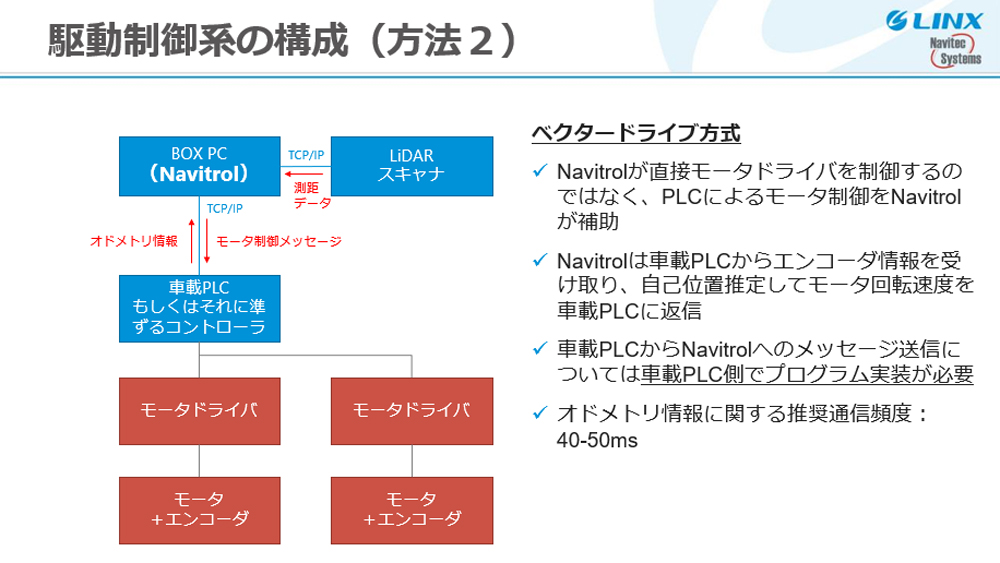
通常の構成では、Navitrolが直接モータドライバを制御します。このためCAN通信に対応したモータドライバの搭載が必須でした。しかしベクタードライブ方式を用いると、PLC経由でモータドライバを制御できるためCAN対応のモータドライバは不要です。
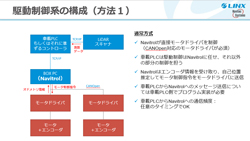
CAN通信での制御方式
|
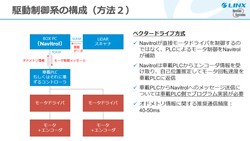
ベクタードライブ方式
|
ベクタードライブ方式を使用するには、次の機能を持つPLCもしくはPLCに準ずるコントローラの搭載が必要です。
① TCP/IP通信ができる
② Navitrolが必要とするコマンドを送信する為のプログラミングができる
ベクタードライブ方式では、Navitrolが直接モータドライバを制御するのではなく、PLCによるモータ制御を Navitrolが補助します。具体的には、NavitrolはPLCからエンコーダ情報を受け取り、自己位置推定を行い、モータ回転速度の参考値をPLCに返信します。その参考値に基づきモータを駆動できるようPLC側でプログラム実装が必要です。これにより既存の機器構成を大幅に変えることなくAGVにNavitrolを搭載することができます。
|
Navitrolは走行以外のアクチュエータも制御することができます。例えば、次のような機構を制御可能です。リニアな高さ制御も可能ですし、I/Oを用いた上下二点の位置制御もできます。
・リフター
・フォークリフト
・ヒッチ(牽引タイプの場合)
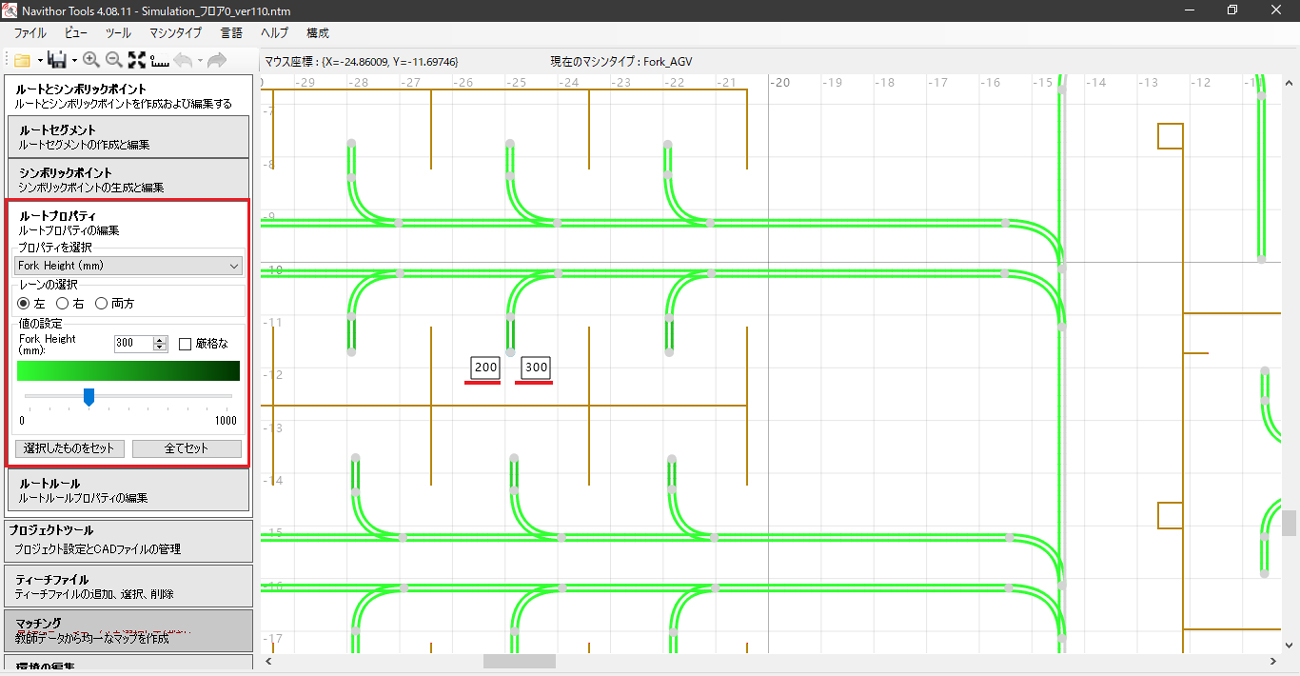
例えばAGF(無人フォークリフト)におけるフォークの昇降は電動ではなく油圧が使われることが多いです。油圧シリンダをPLCで制御している場合、走行ルート上の位置に応じてフォーク高さを自動的にNavitrolから制御する事が出来ます。もちろん、電動シリンダーやモータを使用したリフターの制御も可能です。ルート設定用のアプリケーションソフトの中で、ルートや荷積み/荷下ろしポイントに紐づけて昇降の高さを設定することができます。
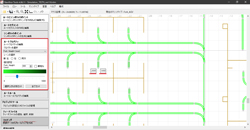
ルートに紐づけて昇降の高さを設定
|

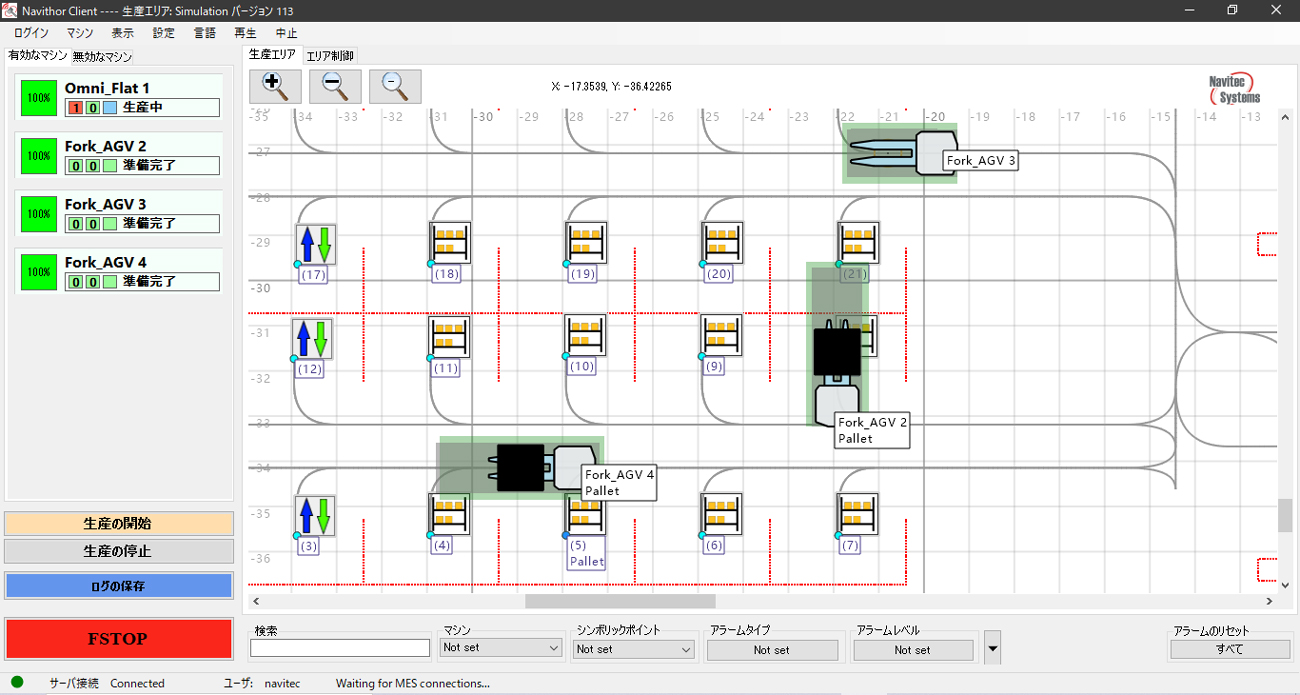
フリートコントロール
|
|
上記のような機能により、Navitec社のAGV制御ソフトは海外のAGFメーカでも数多く採用されています。最近では、オムニホイールやメカナムホイールを使ったAGFも登場しています。
|
Navitec搭載のAGVをご提供可能な車両メーカ様に(株)マキテック様が加わりました。他にも様々なメーカ様がNavitec搭載の車両を提供されています。AGVごと購入を検討される場合は直接お問い合わせください。

|
※LINX Express 配信の中止・アドレスの変更をご希望の方は、お手数ですがこちらよりお問い合わせください。
|
|

|