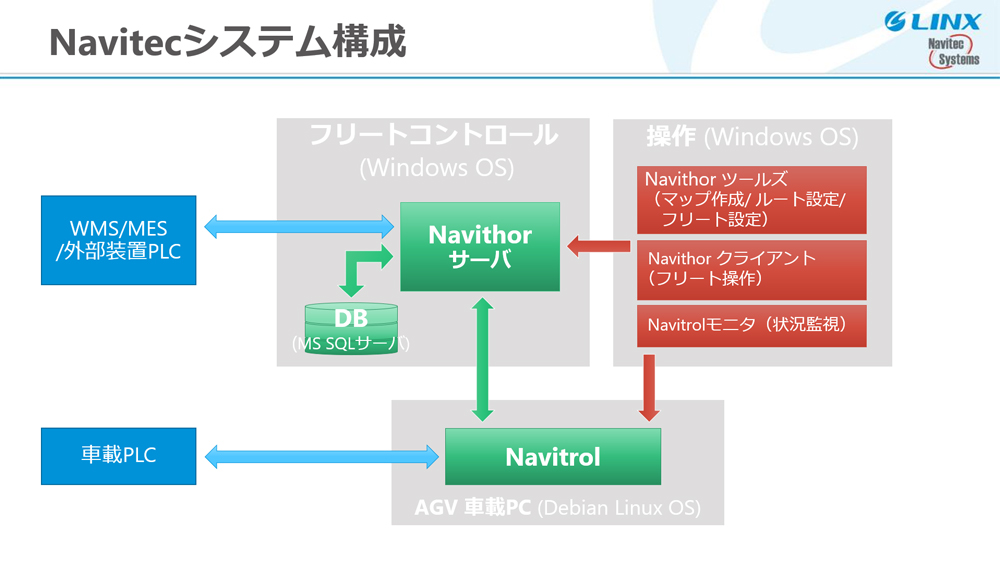
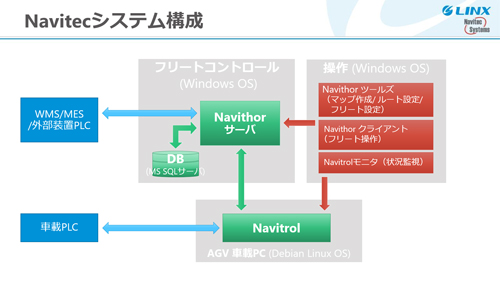
Navithorは最大100台までのAGVやAGFを1つの管制用サーバから制御する事が出来ます。積載型AGVだけではなく、台車牽引型AGV、フォークリフトタイプなど様々なタイプの車両をまとめて制御可能です。
※ただし、Navithorで制御できるのはNavitrolを搭載した車両のみです。
基本的に配車は自動で行われます。WMS/MESといった上位システムや外部PLCからの入力に応じて、Navithorシステムから待機中のAGVもしくは最寄りのAGVに対して自動的に搬送タスクが割り当てられます。
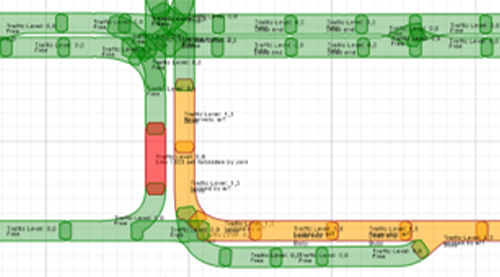
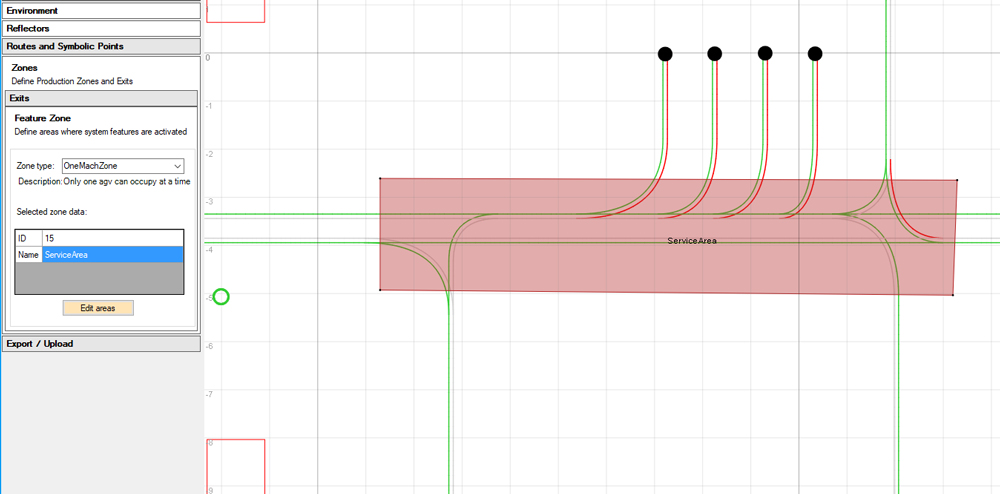
交差点制御は自動で行われます。搬送タスクごとに優先順位を設定したり、排他ゾーンを設定することで特定の搬送車両を優先走行させることも可能です。
走行ルートは、目的地までの可能なルートの中で最短のルートが自動選択されます。ルートのセグメント分割機能により、メンテナンス時などは対象区間を閉鎖することで迂回ルートが自動選択されます。また目的地への到着予測時刻を計算し出力することができます。
WMS(庫内管理システム)/MES(製造実行システム)といった上位システムや装置/エレベーター/シャッター等の外部装置との連携が可能です。通信方法はTCP/IPのソケット通信です。
装置制御用PLC側でNavitecの標準プロトコルに合わせてユーザ側で各種送信コマンドを実装する必要があります。
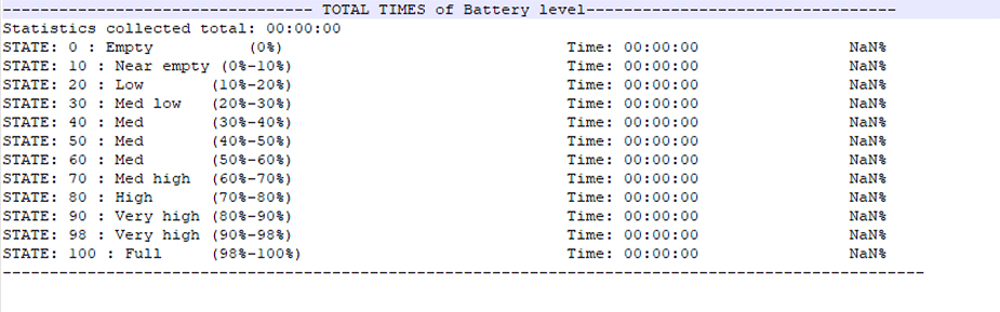
バッテリ残量を管理し、一定値を下回ったら充電ステーションに向かわせるといった制御が可能です。バッテリ残量はPLC側から入力するか、NavitrolとBMSとの連携設定(BMSの機種ごとに有償対応)のいずれかが必要です。
最大3階層のフロア切替が可能です。あらかじめ各階層のマップを登録し、エレベータポイントに各AGVが到着するとフロアを切り替えさせます。(3階層以上への対応については応相談)。同一フロア内でスロープなどにより高低差がある場合にも対応可能です。
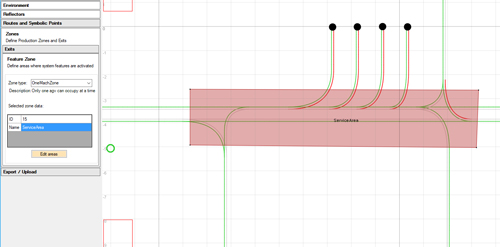
マップ上に緊急時退避エリアを設定可能です。火災報知器などからの入力に応じて、AGVを自動で緊急通路や防火シャッターがあるエリアから退避させ、通路の遮断を防ぎます。
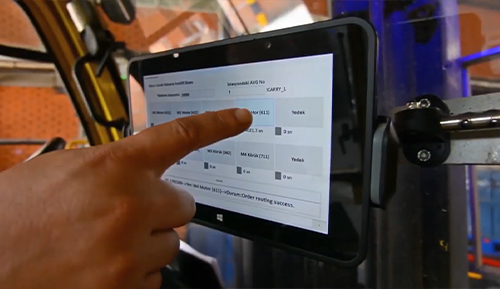
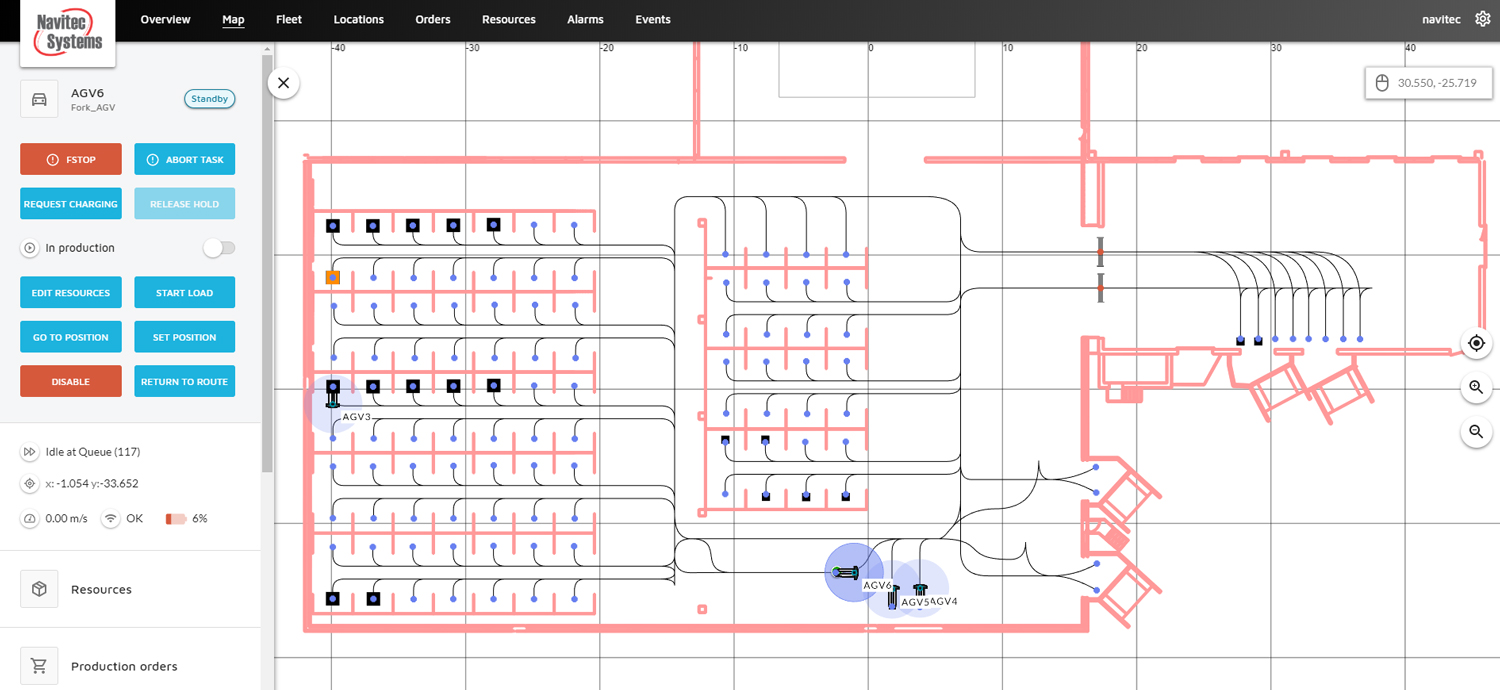
webブラウザベースのUIに対応しているため、スマホやタブレットなど任意のモバイル端末からシステム全体の運行状況確認、車両ごとの状況確認、車両呼び出しや割込み搬送などの操作が可能です。
搬送のボトルネックを洗い出すために、シミュレーション機能が利用できます。あくまでボトルネック部分の検証用で、搬送ライン全体の完全なシミュレーション機能は未実装です。
各車両の稼働履歴は全てSQLデータベースサーバに保存されいつでも参照することができます。但し、時間管理(予兆保全)の機能は未実装のため、稼働時間の監視や稼働時間平均化、保守タイミングの検出などはユーザ側で実装する必要があります。
|