|
Navitrol導入によりAGVの運用はどう変わるのか?
|
AGVナビゲーションソフトウェア「Navitrol」は、個々のAGVに搭載し、NFN(ナチュラルフィーチャ・ナビゲーション)方式による自律走行を可能にします。
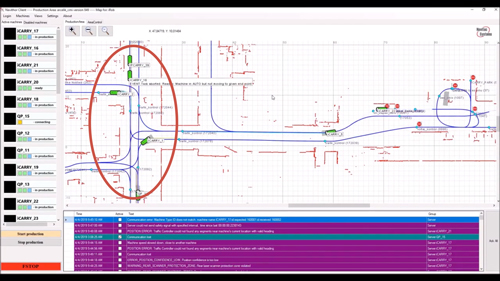
AGVを自律走行させるためには、まず最初にマップを作りルートを設定する必要があります。NavitrolはGUI上で簡単にルート設定することができます。例えば、リンクスでは、デモ機を使ってお客様の工場/倉庫内でのデモを実施することがありますが、マップ作成/ルート設定、そして自律走行開始までにかかる時間は10分を目安にしています。
これまで必要だった磁気テープなどの設置工事は不要になり、導入のリードタイムを大幅に短縮可能です。
導入時と同様に、段取り替えやレイアウト変更によるルート変更も容易に行う事が出来ます。既存のルートに作業ポイントを追加したり、経路を変更してAGVやサーバにアップロードするだけでAGVは新しい経路で走り出します。
これまで現場レベルでは難しかった設定作業をエンドユーザ側で容易に行う事ができるようになり、改善活動に役立てることができます。
従来のSLAM誘導型AGVは、停止位置精度 ±30~50mmが限界でした。しかし、Navitrolは停止位置精度 ±10mm(世界No.1)を実現しています。これにより、従来方式の課題であったAGVの停止位置のバラツキによる搬送不良をなくすことができ、AGVの適用範囲を広げることができます。また、外部装置との連携も可能なため、様々な工程の自動化が可能です。
搬送速度の向上もNFN化のメリットの一つです。例えば磁気誘導方式ではAGVの走行速度は通常0.8~1.3m/sが限界でした。NFN誘導方式ではAGVの速度は最大2.0m/sまで対応可能です。区間ごとの速度設定や加速/減速度の設定も可能なので搬送効率を高めることができます。
障害物回避もNFN化の大きなメリットです。経路上に障害物がある場合、磁気誘導方式では止まるしかありませんでしたが、NFN方式であれば一時的にルートを外れ障害物を回避した上でルートに戻ることができます。Navitrolには優れた障害物回避機能があり、経路上の障害物による搬送効率の低下を防ぎます。
|
Navitec検証動画:
停止位置精度 ±10mm
|
Navitec検証動画:
障害物回避
|
■
Navitrol導入によるAGV運用の変化のまとめ
・導入リードタイムの短縮
・現場レベルでの設定変更による改善活動が可能
・AGVの適用範囲拡大
・搬送効率の向上
・障害物回避による搬送効率の低下防止
|