川崎重工業殿は、全く新しいコンセプトの双腕スカラロボット「duAro」を開発しました。duAroの構造は人の動作範囲・必要領域をシンプルに実現しており、現状の作業工程をそのままに、作業員一人のスペースに設置可能です。
このduAroには、画像処理ライブラリHALCONが標準採用されています。
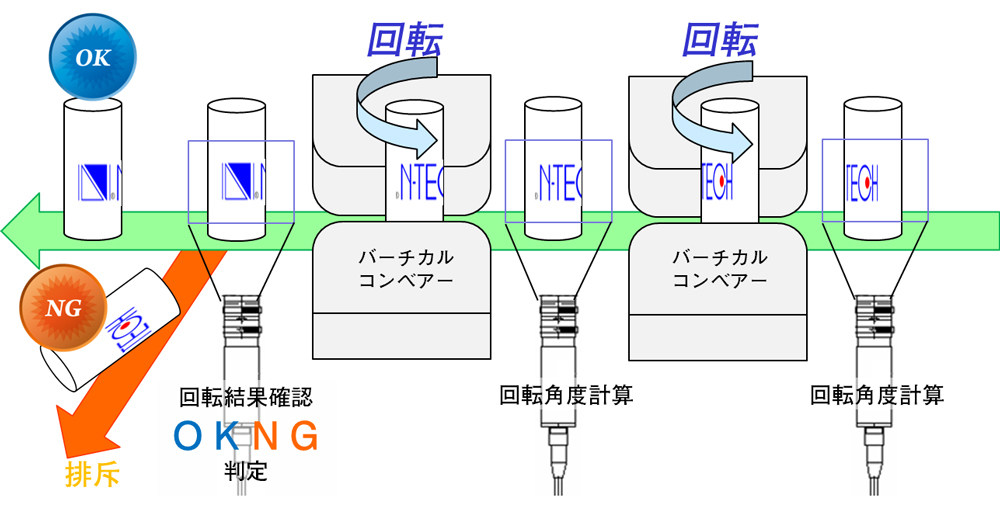
川崎重工業殿はこれまでもロボットに2次元・3次元の画像処理機能を搭載し、お客様のニーズに答えてきました。ロボットビジョンの重要性は日増しに高まっており、今後の重要なキー技術になると考えられています。duAroはビジョンとの連動を前提としており、カメラ用ケーブルがアーム内を通る構造を採用しています。また、そのカメラを利用して、作業台とロボットとのキャリブレーションが簡単に実行できるようになっています。