|
2011年 6月8日〜10日にパシフィコ横浜にて開催された画像センシング展2011では、大変多くのお客様にご来場いただき、誠にありがとうございました。
今回実施した新企画 "HALCONユーザ装置展示 『HALコラボ』 "にてご紹介したHALCON / BASLER ユーザー様装置紹介ムービーを、展示会にご来場いただくことが出来なかったお客様にも広くご覧いただくために、ユーザー様からの特別の許可を得て、LinX
Express にてご紹介していきます。
実際のムービーは以下の 『ユーザー装置紹介ムービー』 ページにアクセスしてご覧下さい。
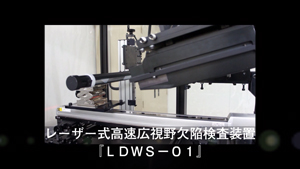
■ タイヨー電機株式会社殿 『レーザー式欠陥検査装置』
|
|

レーザー式欠陥検査装置は、レーザースキャンの結果を画像化して検査することで、
通常のカメラで撮影した画像では抽出の難しい欠陥においても、検査を実現します。
HALCONの画像処理アルゴリズムと組み合わせ、平面パネル素材や円筒型ドラム素材、
WEB素材など幅広い対象に対し、複雑な欠陥種別を自動検出します。
|
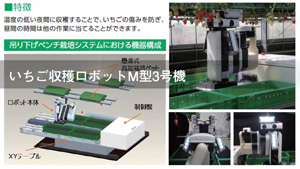
■ 株式会社前川製作所殿
『いちご収穫ロボット』
|
|

いちご収穫ロボットは農林水産省「次世代農業機械等緊急開発事業」にて、前川製作所殿と
(独)農研機構/生研センターおよび早稲田大学が共同で開発したロボットシステム。
直接果実に触れることなくHALCONの画像処理によりいちごの位置検出および収穫適期の
判断を行い、専用マニピュレータにより果実を傷めることのない収穫を可能としています。
夜間の収穫作業の軽労化・自動化を実現すべく、実稼動を意識したシステムデザイン、
システムコストの削減、運用方法の確立に取り組まれています。
|
■
「映像情報インダストリアル5月号」にて『HALCON』記事が掲載
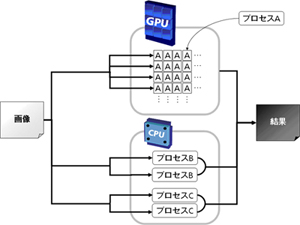
豊富な三次元画像処理機能を提供する「HALCON」とロボットとの組み合わせに最適なGigEカメラ「ace」に関する記事が、業界専門誌「映像情報インダストリアル5月号」の特集【驚きの認識力!ロボットビジョン】にて掲載されました。
本号では、その記事内容をダイジェストでお伝えします。さらに、「映像情報インダストリアル5月号」に掲載された全頁の記事をPDFにてダウンロードしていただけますのでぜひご一読ください。
■ 記事全文はPDF形式にて以下からダウンロードできます
 映像情報インダストリアル5月号記事
映像情報インダストリアル5月号記事
|