|
|
80%の壁が見えなくても走り続けられる、世界最高の自己位置推定能力!AGVナビゲーションソフトウェア「Navitrol」
|
自律走行AGVにおいて、周囲の環境が変化しても決められたルートを走り続けられることは重要な機能の一つです。
工場や倉庫内では、人やフォークリフトが絶え間なく通行し、資材や機材が移動され、刻々と状況が変化します。
壁や柱を参照し自己位置推定するNFN方式(SLAM誘導式とも呼ばれる)のAGVの場合、そのような環境変化によって、自己位置をロストして走れなくなるといった問題がしばしば発生します。
一般的にROSベースのSLAMソフトウェアの場合、参照する壁の情報が60~80%は必要と言われています。つまり、20~40%の壁が遮られてしまうと自己位置を喪失し、走れなくなってしまいます。

|
では、Navitrolはどうでしょうか?我々はその性能を確かめるべく、実験を行いました。
その検証動画をご覧ください。
|
|
動画の解説:80%の壁が見えなくてもNavitrolは走行可能
|
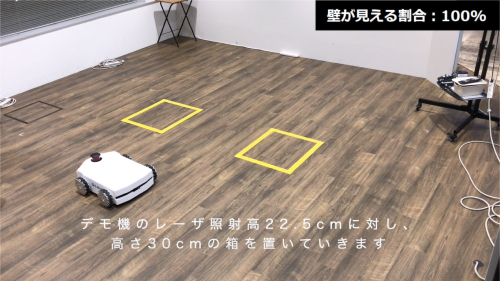
動画の内容を解説します。
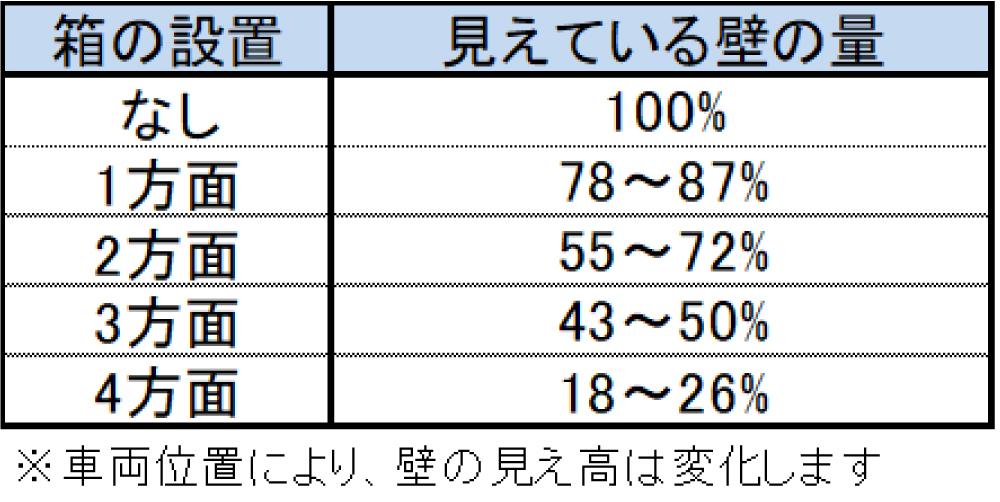
走行しているAGVの周りに箱を置き、だんだん壁が見えなくなるように遮っていきます。
1方面に箱(長さ120cm)を2個置くと、約20%程度の壁が見えなくなります。
以下右側のgif画像ではモニタ画面を表示しています。緑色の部分がAGVが見えている壁です。
■
1.周囲に遮るものがなく、全ての壁が見える状態
■
2.箱に遮られ奥側の壁20%が見えなくなった状態
■
4.3方面が遮られ、60%が見えなくなった状態
■
5.80%の壁が見えなくてもルート通り走行し、停止位置精度に影響なし
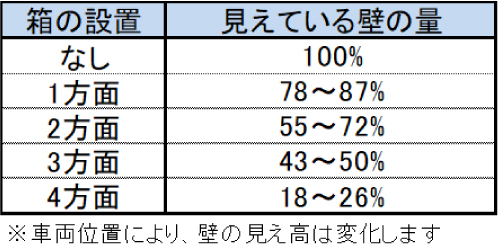
今回、80%の壁が見えなくなってもAGVはルート通りに走行し、停止位置精度にも影響ありませんでした。
|
|
AGV同士が行き交う交差点で互いの視界を補い合う、
Navitec社独自の機能「ダイナミックマッピング」
|
自律走行AGVの視界を遮るのは資材だけではありません。例えば、交差点では複数のAGVが互いに行き交うため、AGV同士が互いの視界を遮り合って周囲が見えなくなってしてしまいます。
Navitec社のソフトウェアにはダイナミックマッピングという機能があり、AGV同士が互いに視界を補い合う事ができます。この機能により、交差点での交通量を落とすことなく制御することができます。
|
|
他にもYouTubeにてNavitec検証動画や海外採用事例を公開中
|
このほかにも、Navitec関連の動画をYouTubeのLINXチャンネルで公開しています。
「Navitec検証シリーズ」では、同社のAGV制御ソフトの機能/性能、どんな事ができるのかを検証し、動画で公開しています。
「こんな機能はあるのかな?」「こんな事はできないだろうか?」「こういう動画が見たい」などご意見/ご要望/疑問点があれば、ぜひお知らせください。
|
※LINX Express 配信の中止・アドレスの変更をご希望の方は、お手数ですがこちらよりお問い合わせください。
|
|

|