検査システムの概要
|
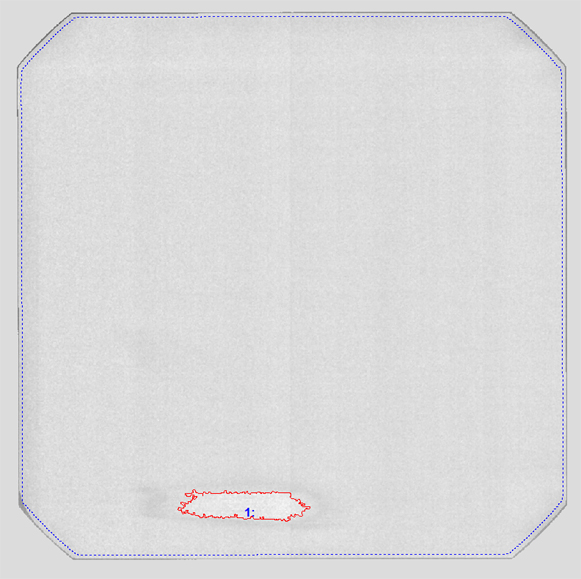
汚れや光沢のある斑点など、表面欠陥の情報を基に各ウエハは分類されます。Tordivel Solar AS社のこれまでの経験から、本システムにおいて欠陥を次のように定義しています。
・汚れ領域(大小の区別あり)
・線
・黒点
・吸着痕
・光沢のある斑点
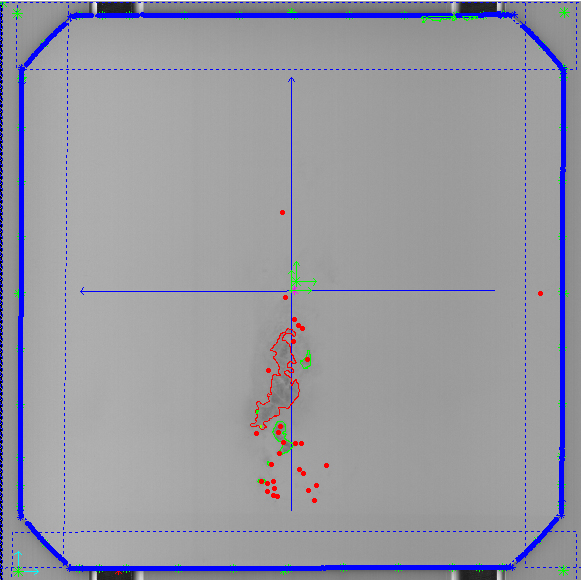
欠陥の種類に合わせ、異なる欠陥検出アルゴリズム(例:輝度値レベルの解析)が用いられます。全方向均一照明との組み合わせにより、本システムは単結晶および多結晶構造のウエハ上に存在する欠陥を検出します。
|
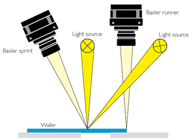

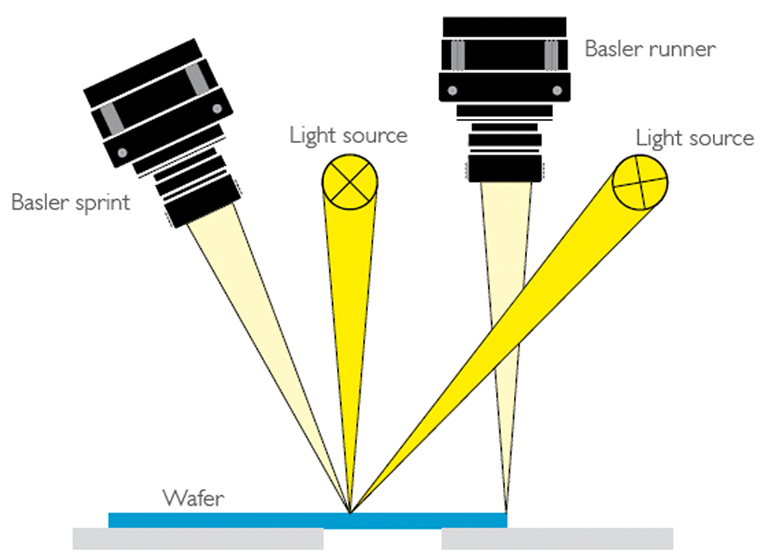
図1.ハードウェアセットアップ
|
本システムは、パソコンと2種類のラインスキャンカメラ、そしてそれぞれのカメラの横に角度をつけて設置された照明(図1における右端の照明)と全方向均一照明(図1におけるカメラ間の照明)で構成されています。パソコンに取り込まれた画像は、欠陥検出アルゴリズムに従い検査が行われます。また、特殊な照明により画像中の結晶構造が除去され、汚れや黒点などのウエハ表面の欠陥が鮮明に現れて検出されます。
ラインセンサを用いて、1ピクセルあたり80㎛の分解能で撮影された4Mピクセルの高品質な画像と最先端処理アルゴリズムの組み合わせにより、非常に優れた検出感度と信頼度の高い検査を実現しています。カメラはBasler社のラインセンサを使用しており、検査システムには2台のrunner
(GigE準拠、2kモデル)カメラと2台のsprint (Camera Link準拠、4kモデル)カメラを搭載しています。
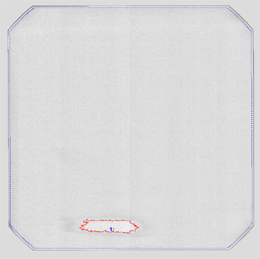
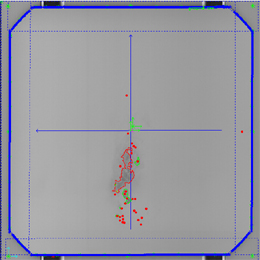
図2.検査結果例
Tordivel Solar AS社のCEOであるThor Vollset氏は次のように語っています。
「ラインスキャンカメラには、性能と価格、使いやすさの点からBasler社のrunnerカメラを選定しました。GigEインターフェースと高性能なpylonドライバーを使用できるため、runnerカメラは極めて良い選択でした。Camera Link規格に準拠した高性能なsprintカメラは、大きな伝送帯域を確保でき、非常に感度が良いカメラです。我々は1台のパソコンに接続された4台のカメラからの画像のリアルタイム取込にたいへん満足しています。」
|