|
■
ステレオ計測との組み合わせで、より精密な計測を実現!
カメラ2台で対象物を撮影して距離計測を行うステレオ計測と、透視歪マッチングを組み合わせることで、より精密な三次元計測が可能になります。
例えば、左右のカメラでは対象物の見え方が異なりますが、透視歪マッチングの適用により、1つのモデルで左右の画像の対象物の位置を正確に計測できます。この左右の画像のマッチング結果と、ステレオキャリブレーションによって得られる2台のカメラの位置関係から、計測部位の精密な三次元位置計測を行えます。

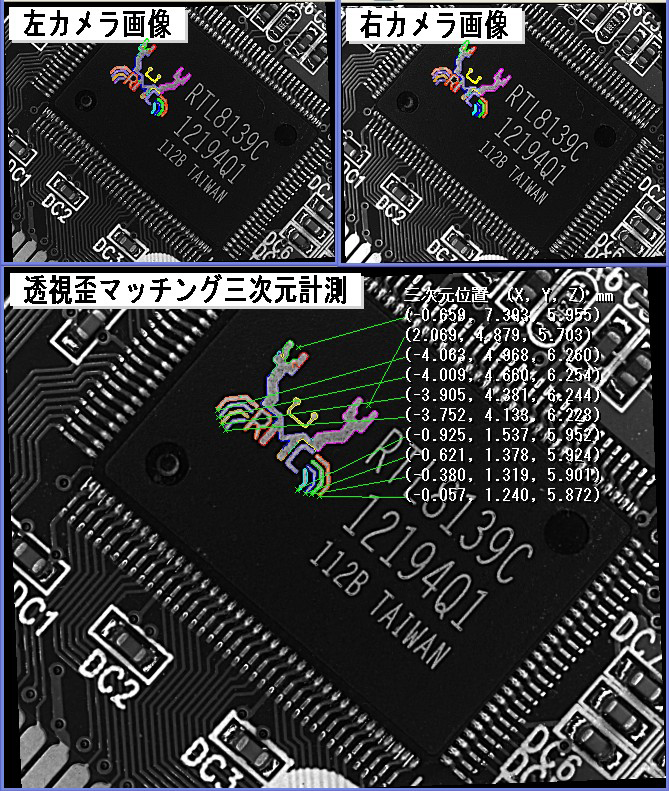
透視歪マッチングとステレオ計測の組み合わせによる三次元計測
上図は、2台のカメラから取得した画像に透視歪マッチングを適用し、それぞれのマッチング結果から算出される対応点に対してステレオ計測を実行した結果を示しています。
|