|

|
|
پ، HALCON‚ة‚و‚é3ژںŒ³‰و‘œڈˆ—‹@”\
|
|
ƒ}ƒVƒ“ƒrƒWƒ‡ƒ“ƒ\ƒtƒgƒEƒGƒA‚ئ‚µ‚ؤ3ژںŒ³ڈˆ—‹@”\‚ً•Wڈ€‚إ’ٌ‹ں‚·‚éپAگ¢ٹE“I‚ة—Bˆê‚جگ»•i‚إ‚ ‚éHALCON‚حپA3ژںŒ³‰و‘œڈˆ—‚ة‘خ‚µ‚ؤ‚¢‚‚آ‚à‚جژè–@‚ً’ٌ‹ں‚µ‚ؤ‚¢‚ـ‚·پB‚»‚ê‚حپAƒPپ[ƒXƒoƒCƒPپ[ƒX‚إژہچغ‚ج‘خڈغ•¨‚âگف”ُٹآ‹«‚âƒAƒvƒٹƒPپ[ƒVƒ‡ƒ““à—e‚ة‰‚¶‚ؤچإ“K‚بژè–@‚ً‘I‘ً‚·‚é•K—v‚ھ‚ ‚邽‚ك‚إ‚·پB
پ@پ@ |
|
پ،
3D ƒ}ƒbƒ`ƒ“ƒO |
|
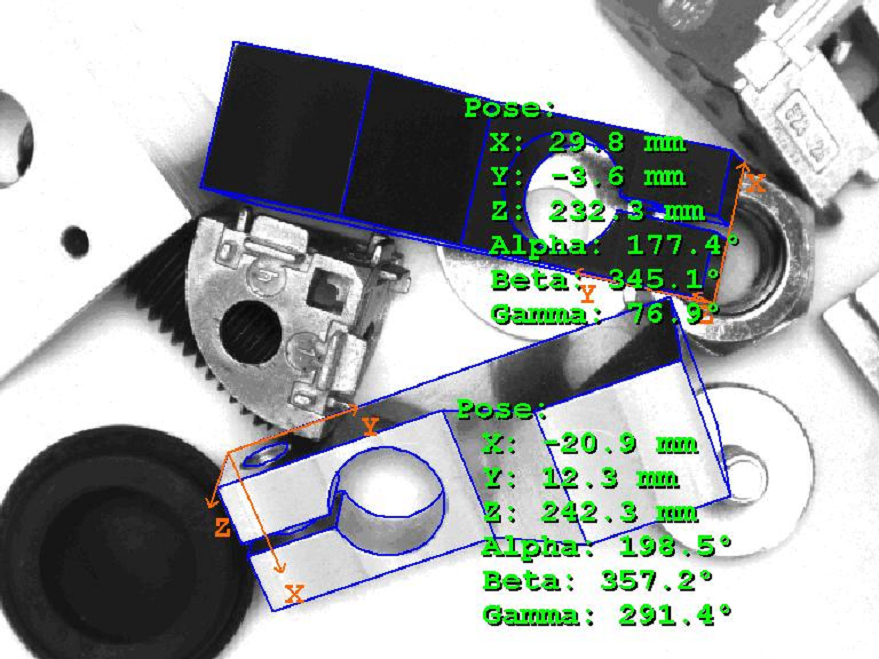
2ژںŒ³‚جƒpƒ^پ[ƒ“ƒ}ƒbƒ`ƒ“ƒO‹Zڈp‚ً3ژںŒ³‚ةٹg’£‚µ‚½ٹvگV“I‚ب‹@”\‚إ‚·پB‘خڈغ•¨‚ج3ژںŒ³CADƒ‚ƒfƒ‹پiDXFŒ`ژ®پj‚©‚çپAژ©“®“I‚ةٹeˆت’uپEژpگ¨‚ة‚¨‚¯‚郂ƒfƒ‹‚ًگ¶گ¬‚µ‚ـ‚·پB
3Dƒ}ƒbƒ`ƒ“ƒO‚إ‚ح1‘ن‚جƒJƒپƒ‰‚©‚畨‘ج‚ج3ژںŒ³ˆت’uپEژpگ¨‚ًژو“¾‚·‚邱‚ئ‚ھ‰آ”\‚ئ‚ب‚è‚ـ‚·پB
|


ƒNƒ‰ƒ“ƒv‚ج3Dƒ}ƒbƒ`ƒ“ƒOŒ‹‰ت |
|
|
|
پ،
‰~Œ`پE‹éŒ`‚جŒ`ڈَ‚ً—p‚¢‚½3ژںŒ³ˆت’uپEژpگ¨ژو“¾ |
|
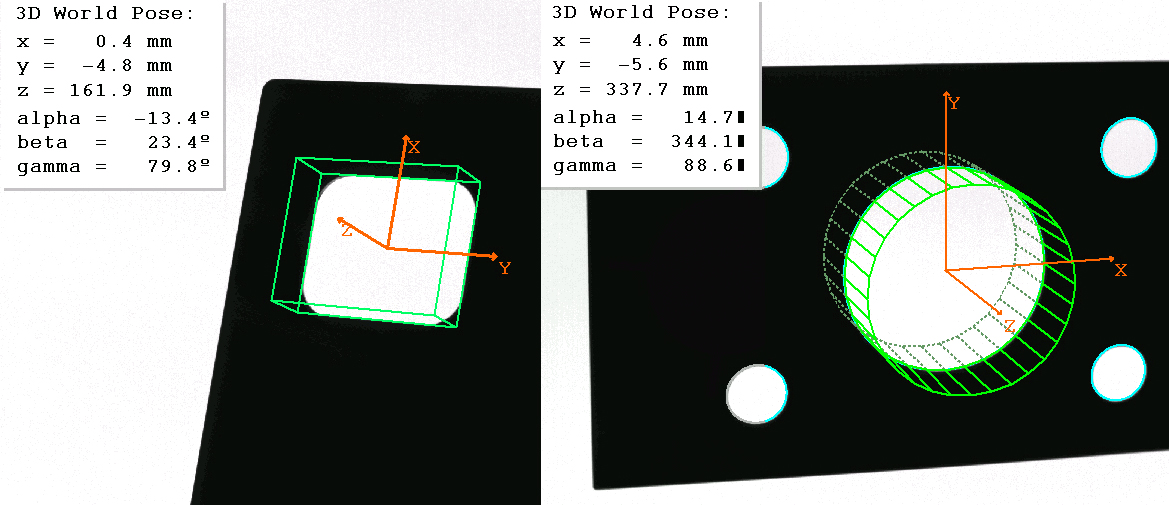
‘خڈغ•¨‚ةٹù’m‚ج‰~‚ ‚é‚¢‚ح‹éŒ`‚ھ‚ ‚éڈêچ‡پAژو“¾‚µ‚½‰و‘œ’†‚©‚çپA‰~‚ ‚é‚¢‚ح‹éŒ`ڈَ‚ج•”•ھ‚ً’ٹڈo‚µپA•دŒ`“xچ‡‚¢‚ًŒ³‚ة‘خڈغ•¨پi‘خڈغ•¨’†‚ج‰~پE‹éŒ`پj‚جƒJƒپƒ‰‚©‚ç‚جˆت’uپEژpگ¨ڈî•ٌ‚ھژو“¾‚إ‚«‚ـ‚·پB
|
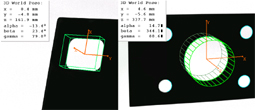
‰~Œ`پE‹éŒ`‚ةٹî‚أ‚3ژںŒ³ˆت’uپEژpگ¨ژو“¾Œ‹‰ت |
|
پ،
ƒXƒeƒŒƒIƒrƒWƒ‡ƒ“‚ة‚و‚é3ژںŒ³Œ`ڈَŒv‘ھ |
|
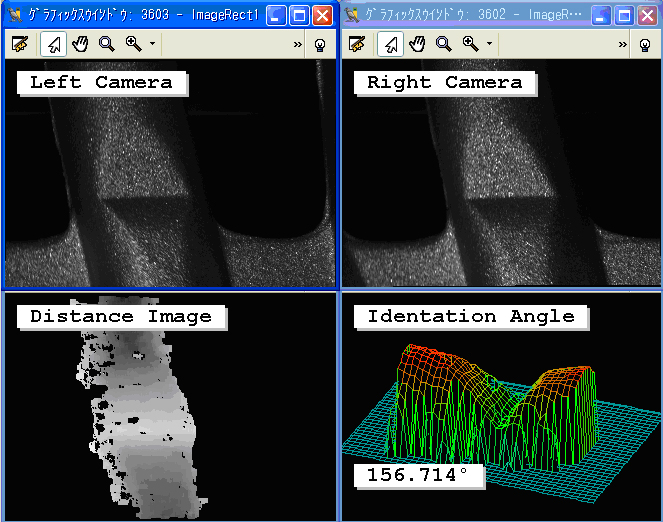
ƒXƒeƒŒƒIƒrƒWƒ‡ƒ“‚حپA3ژںŒ³‰و‘œڈˆ—‚ئ‚µ‚ؤ‚حپA2‘ن‚جƒJƒپƒ‰‚ً—ک—p‚·‚é3ژںŒ³Œv‘ھژè–@‚ئ‚µ‚ؤچL‚’m‚ç‚ê‚ؤ‚¢‚ـ‚·پBƒJƒپƒ‰1‚ئƒJƒپƒ‰2‚إ‘خڈغ•¨‚ج“¯‚¶ˆت’u‚ً‘¨‚¦پAژOٹp–@‚ة‚و‚è‚»‚جˆت’u‚جچ‚‚³‚ًŒv‘ھ‚µ‚ـ‚·پB‘خڈغ•¨‚ج“¯‚¶ˆت’u‚جŒںڈo‚ة‚حHALCON‚جƒOƒŒƒC’lƒ}ƒbƒ`ƒ“ƒO‚ج‹@”\‚ھ‘g‚فچ‚ـ‚ê‚ؤ‚¢‚ـ‚·پB‚±‚جژOٹp–@‚جڈˆ—‚ً‘SƒsƒNƒZƒ‹‚ة‘خ‚µ‚ؤ“K—p‚·‚邱‚ئ‚إژہŒ»‚µ‚ـ‚·پB
|
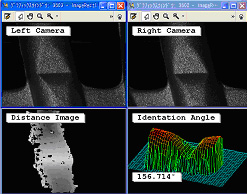
ƒXƒeƒŒƒIƒrƒWƒ‡ƒ“‚ة‚و‚镽–ت‚جگط‚êٹp‘ھ’è
پi‰E‰؛پFŒ‹‰ت‚جƒOƒ‰ƒtƒBƒbƒNƒX•\ژ¦پj |
|
پ،
Œُگط’f–@ |
|
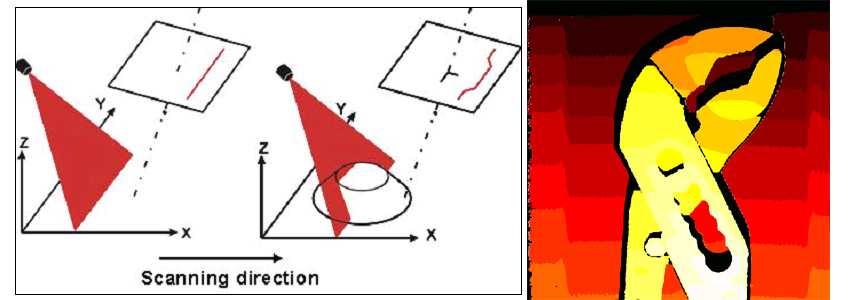
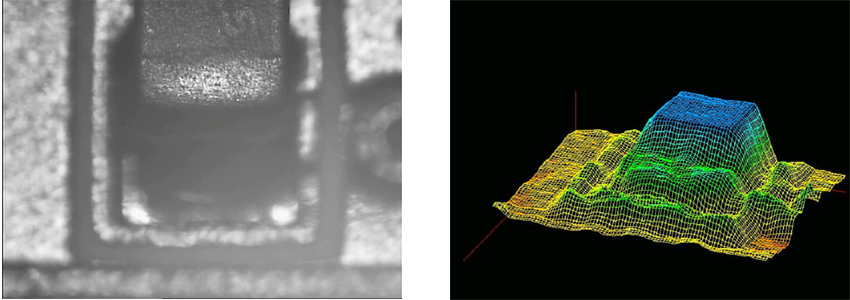
Œُگط’f–@‚حƒŒپ[ƒUپ[‚ج”½ژثŒُ‚ً—ک—p‚·‚éژè–@‚إ‚·پBƒŒپ[ƒUپ[‚ج”½ژثŒُ‚ًƒvƒچƒtƒ@ƒCƒ‹‚ئ‚µ‚ؤژو“¾‚·‚邱‚ئ‚إ•¨‘جگ³–ت‚جچ‚‚³Œ`ڈَ‚ً•œŒ³‚·‚邱‚ئ‚ھ‰آ”\‚إ‚·پB
|
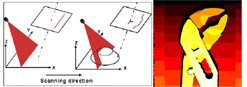
Œُگط’f–@‚جƒŒپ[ƒUپ[‚ئƒJƒپƒ‰‚جٹضŒWپiچ¶پj
ƒyƒ“ƒ`‚ً‘خڈغ•¨‚ئ‚µ‚ؤچ‚‚³ڈî•ٌ‚ً•œŒ³پi‰Eپj |
|
پ،
چ‡ڈإ“_–@ |
|
چ‡ڈإ“_–@‚إ‚حپAƒJƒپƒ‰‚ئ‘خڈغ•¨‚ج‹——£‚ًˆê’è—ت‚¸‚آ•د“®‚³‚¹‚ب‚ھ‚ç•،گ”–‡‚ج‰و‘œ‚ًژB‘œ‚µپAڈإ“_‚جچ‡‚ء‚½•”•ھ‚ج‚ف‚ًڈd‚ثچ‡‚ي‚¹‚邱‚ئ‚إ3ژںŒ³Œ`ڈَ‚ً•œŒ³‚µ‚ـ‚·پB
|
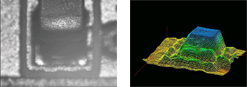
چ‡ڈإ“_–@‚ً“K—p‚·‚é‘خڈغ•¨پiچ¶پj
چ‡ڈإ“_–@ژہچsŒ‹‰تپi‰Eپj |
|
پ،
‚»‚ج‘¼‚ج3ژںŒ³‰و‘œڈˆ—‹@”\‚ئچ،Œم‚ج‹@”\ٹg’£ |
|
HALCON‚حچ،‰ٌڈذ‰î‚µ‚½‹@”\ˆبٹO‚ة‚àپAƒtƒHƒgƒپƒgƒٹƒbƒNƒXƒeƒŒƒI‚â“ء’¥“_‚ً—ک—p‚µ‚½ژè–@‚ب‚ا‚ًٹù‚ة’ٌ‹ں‚µ‚ؤ‚¢‚ـ‚·پB
10”Nˆبڈم‚ة‚ي‚½‚ء‚ؤ3ژںŒ³ڈˆ—‹@”\‚ةٹJ”“ٹژ‘‚ًŒp‘±‚µ‚½گ¬‰ت‚ھچ،‚جHALCON‚ً•¨Œê‚ء‚ؤ‚¢‚ـ‚·پB‚ـ‚¾‚ـ‚¾‹Zڈp“I‚ب’§گي‚حژn‚ـ‚ء‚½‚خ‚©‚è‚إ‚ ‚èپAƒچƒ{ƒbƒg‹ئٹE‚إ‚حˆہ’肵‚ب‚¢ڈئ–¾ڈًŒڈ‚âپA•،ژG‚ةƒoƒ‰گد‚ف‚³‚ꂽƒڈپ[ƒN‚ج”Fژ¯پA”¼“±‘ج‹ئٹE‚إ‚ح1umˆب‰؛‚جچ‚‚³گ¸“x—v‹پ‚ة‰ء‚¦‚ؤ‹@چ\Œn‚àٹـ‚ك‚½200ms‚ئ‚¢‚¤ڈˆ—ژٹش—v‹پ‚ب‚اپA‰ًŒˆ‚·‚ׂ«‰غ‘è‚ح‘½‚‚ ‚è‚ـ‚·پB‚»‚ج‚و‚¤‚ب‰غ‘è‚ة‘خ‚µ‚ؤچ‘“à‚ج‚¨‹q—lگ”ژذ‚ئ‹¤“¯‚إŒ¤‹†ٹJ”‚ًگi‚ك‚ؤ‚¨‚èپA‚»‚ê‚ç‚جگ¬‰ت‚àHALCON•Wڈ€‹@”\‚ئ‚µ‚ؤژںٹْƒoپ[ƒWƒ‡ƒ“‚ة‚ؤƒٹƒٹپ[ƒX‚³‚ê‚ـ‚·پB
پ@پ@
چ،Œم10”Nٹش‚àŒp‘±‚µ‚ؤٹg’£‚µ‘±‚¯‚éHALCON‚ج3ژںŒ³‰و‘œڈˆ—‹@”\‚ًگ¥”ٌٹˆ—p‚‚¾‚³‚¢پB
|
پ@پ@
پ@پ@پ@
پ@پ@پ@ |
|
پ،
HALCON–³ڈ‘چچ‡‘جŒ±پEٹwڈKƒLƒbƒgپ@پuHALCON Trial Kitپv“oڈêپI
|
|
HALCON‚ج‹@”\‚ً‘چچ‡“I‚ة‘جŒ±‚إ‚«‚éHALCON Trial Kit‚ًƒٹƒٹپ[ƒX‚µ‚ـ‚µ‚½پB
HALCON‚ً“±“ü‚µ‚½‚ھژg‚¢‚±‚ب‚·‚ـ‚إ‚ة‚حژٹ‚ء‚ؤ‚¢‚ب‚¢‚ئٹ´‚¶‚ؤ‚¢‚éHALCONƒ†پ[ƒUپ[—lپA
ٹبˆصƒZƒ“ƒTپ[‚إ‚حچ¢“ï‚بƒAƒvƒٹƒPپ[ƒVƒ‡ƒ“‚ًڈ_“î‚ةژہŒ»‚·‚ׂپAHALCON“±“ü‚ًŒں“¢’†‚ج‚¨‹q—l‚ة‚ئ‚ء‚ؤپA
‚ـ‚³‚ة—‘z“I‚ب‘جŒ±پEٹwڈKƒLƒbƒg‚ً–³ڈ‚ة‚ؤ‚¨ژژ‚µ‚¢‚½‚¾‚¯‚ـ‚·پB
HALCON Trial
Kit‚حپAˆب‰؛‚جwebƒTƒCƒg‚و‚èƒ_ƒEƒ“ƒچپ[ƒh‚·‚邱‚ئ‚ھ‚إ‚«‚ـ‚·پB
پiپ¦ƒ_ƒEƒ“ƒچپ[ƒh‚ة‚حƒ†پ[ƒUپ[“oک^‚ھ•Kگ{‚إ‚·پj
پ«پuHALCON Trial Kitپv‚ج ڈعچׂح‚±‚؟‚çپ«
https://linx.jp/product/mvtec/halcon/trial_kit/
|
HALCON Trial Kit ‹N“®‰و–ت
|
|
|
پ@پ@ |
|
|
پ،
HALCONگV‹³‰بڈ‘
چD•]””„’†پI
|
|
پu‰و‘œڈˆ—ƒAƒ‹ƒSƒٹƒYƒ€‚ئژہ‘HƒAƒvƒٹƒPپ[ƒVƒ‡ƒ“پv‚جڈعچ×پE‚¨گ\‚µچ‚ف‚ح‚±‚؟‚ç
پ«
https://linx.jp/product/mvtec/halcon/

|
| پ،
HALCON
8.0‚جƒfƒ‚”إ‚ًژg—p‚µ‚ؤ‚جƒIƒ“ƒ‰ƒCƒ“ژ©ڈKڈ‘ |
|
–{ڈ‘‚حƒIƒ“ƒ‰ƒCƒ“ژ©ڈKڈ‘‚ئ‚µ‚ؤ‚ج“ء’·‚ًژ‚؟پA•tک^CD-ROM‚©‚çHALCON 8.0‚جƒfƒ‚”إ‚ًƒCƒ“ƒXƒgپ[ƒ‹‚·‚邱‚ئ‚إپA
–{ڈ‘‚ة‚ؤڈذ‰î‚µ‚½ژہ‘H“I‚بƒTƒ“ƒvƒ‹ƒvƒچƒOƒ‰ƒ€‚ًژہچs‚إ‚«‚ـ‚·پB‚ـ‚½پAٹeڈح‚إ‰ًگà‚µ‚½‹Zڈp“à—e‚ًƒxپ[ƒX‚ة‰غ‘è‚ھگف‚¯‚ç‚ê‚ؤ‚¨‚èپA
HALCONƒfƒ‚”إ‚ً—p‚¢‚ؤƒIƒ“ƒ‰ƒCƒ“‚إٹwڈK‚·‚邱‚ئ‚ھ‚إ‚«‚ـ‚·پB
|
|
|