|
��
3�����ʒu�p���擾�����p�����o�[�R�[�h�ǂݎ��
|
| ��
3�����ʒu�p���擾 |
|
HALCON8.0����̐V�@�\�Ƃ��āA�l�p�`�̌`����3�����ʒu�p�������擾�ł���悤�ɂȂ�܂����B���̐V�@�\��L���Ɋ��p���Ă����������Ƃɂ��A���G�ȏ������ɂ߂ėe�ՂɎ��s���邱�Ƃ��\�ƂȂ�܂��B����̓o�[�R�[�h�ǂݎ��ɂ��̐V�@�\��L���ɑg�ݍ���������Љ�܂��B
|
| ��
�C�ӂ̈ʒu�p�������������x���̃o�[�R�[�h�ǎ� |
|
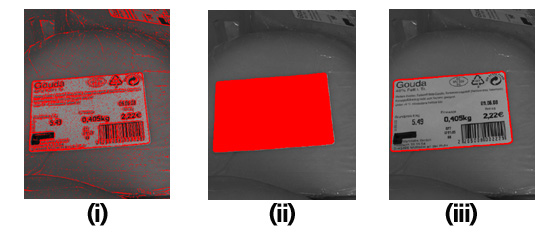
�ǂݎ��̑ΏۂƂȂ�̂̓`�[�Y�ɓ\�t���ꂽ���x����̃o�[�R�[�h�ƂȂ�܂��B���̎���ɂ�����ۑ�Ƃ��āA�ΏۂƂȂ�`�[�Y�͕s�K���ɐςݏグ���Ă���A���x���͈��̈ʒu�p�����������ʏ�̕��@�ł͔F��������Ƃ������Ƃ��������܂��B���̂悤�ȈČ��ɑ��ĔF���������I�ɍ��߂邽�߂ɁA�ȉ��̂悤�Ȏ�@��p���邱�ƂŊm���ȃf�R�[�h���\�ƂȂ�܂��B
|

�@���x���摜
|
|
�@
(��) �܂����I�������l�@��p���đ�܂��ȃ��x���̗̈�𒊏o���܂��B
(��) ���t�H���W�[�����A�`������ʉ�͂�p���āA���x���̗̈�݂̂𒊏o���܂��B
|
|
(��)
(��)�ŋ��߂��̈悩��1�s�N�Z���̕������������E�̈�݂̂𒊏o���A���̗̈�ɑ��Ėc��������K�p���邱�Ƃɂ��A���x���̋��E�ɏ_��ɉ����Ă���A���A���x�����E�̃G�b�W���o�ɂ͕K�v�\���ȕ����������̈�邱�Ƃ��ł��܂��B
|
|
|
|
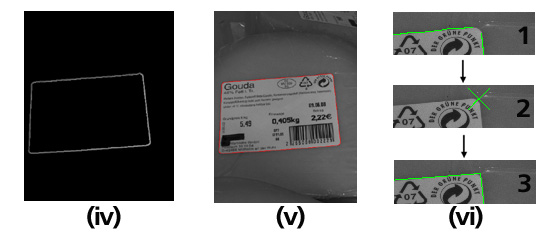
(��) (��)�Ŏ擾�����̈�ɉ�͔͈͂��i�荞�݂܂��B���̑���ɂ��A���̌�̏������s���₷���Ȃ�Ƌ��ɁA�摜�S�̂ɑ��ď������s���̂ɔ�ׂđ啝�ɏ��������������邱�Ƃ��\�ł��B
�@ (��) ���x���̋��E�̃G�b�W�𒊏o���܂��B��͔͈͂��i�荞���Ƃɂ��]���ȃG�b�W�𒊏o���邱�ƂȂ��A�K�v�ȃG�b�W�݂̂������ɒ��o����Ă��܂��B (��)
�擾�����G�b�W���ȉ��̎菇�ɂ���`�ɋߎ����܂��B
�@�@�֊s�G�b�W�����A���������݂̂𒊏o���܂��B
�A�@����ꂽ���������̃G�b�W���ߎ����A���̌�_�����߂܂��B
�B�@����ꂽ4�̌�_���Ȃ��悤�ɋ�`�����܂��B�������邱�ƂŃ��x�������͂ދ�`���T�u�s�N�Z�����x�ŋ��߂邱�Ƃ��\�ł��B
|
|
|
|
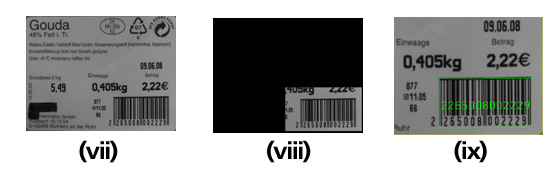
(��)�@����ꂽ��`��XLD�f�[�^��p���āA3�����ʒu�p�����擾���܂��B����́A�J���������p�����[�^�Ƌ�`��XLD�f�[�^�A��`�i���x���j�̎��ۂ̑傫����3�̏���p�ӂ���A1�̃I�y���[�^���Ăяo�������Ŏ擾���邱�Ƃ��\�ł��B����ꂽ�ʒu�p����p���āA���x����C�ӂ̈ʒu���猩���摜�ɕϊ����邱�Ƃ��\�ƂȂ�܂��B���̑����̃A�v���P�[�V�����̏ꍇ�Ɠ��l�ɁA������^�ォ�猩���摜�ɕϊ����܂��B
�@
(��)
�@���x�����Ńo�[�R�[�h���ǂ��Ɉ������邩�͊��m�̏��ł��̂ŁA�o�[�R�[�h�����݂���̈�ɉ�͔͈͂��i�荞�݂܂��B
�@
(��)�@�Ō�ɒʏ�̎�@�Ɠ��l�Ƀo�[�R�[�h��ǂݎ���Ă������������ŁA���ɍ����F�����ł̃o�[�R�[�h�ǎ悪�\�ƂȂ�܂��B
|
|
|
�ȏ�̂悤�ɁAHALCON�ł̓I�y���[�^�̑g�ݍ��킹����Ő��x�A���x�̗����̖ʂŊi�i�Ɍ����}�邱�Ƃ��\�ł��B����͂��̂ق�̈������������܂������AHALCON�̎������̉\���������Ă���������K���ł��B
|
|
|
|
��
HALCON�V���ȏ��@�D�]�������I
|
|
�u�摜�����A���S���Y���Ǝ��H�A�v���P�[�V�����v�̏ڍׁE���\�����݂͂�����
��
https://linx.jp/product/mvtec/halcon/

�@ |
| ��
HALCON
8.0�̃f���ł��g�p���ẴI�����C�����K�� |
|
�{���̓I�����C�����K���Ƃ��Ă̓����������A�t�^CD-ROM����HALCON
8.0�̃f���ł��C���X�g�[�����邱�ƂŁA�{���ɂďЉ�����H�I�ȃT���v���v���O���������s�ł��܂��B�܂��A�e�͂ʼn�������Z�p���e���x�[�X�ɉۑ肪�݂����Ă���AHALCON�f���ł�p���ăI�����C���Ŋw�K���邱�Ƃ��ł��܂��B
|
|
|

