|
ハードウェア/担当者に依存しないMotion制御ノウハウの蓄積を
可能にするCODESYS SoftMotion
|
■
装置開発におけるMotion制御開発の課題
装置開発において高速・高精度なMotion制御の実現は装置性能を左右する要素の一つになっており、開発工数としても大きなウェイトを占めるようになってきています。
その一方でMotion制御には各メーカー毎にノウハウが豊富にあり、その開発も限られたスペシャリストによって行われているのが現状です。ここに二つの大きな課題が隠れています。
・使用する機材(コントローラー、ネットワークドライブなど)に依存した形でソフトウェア資産が構築されてしまい、最適な機器選定(コスト・性能)を制限してしまう
・複雑なMotionソフトウェアは開発担当者しか触ることが出来ず、派生装置を開発したり追加改造を行う際に当該の開発担当者無しでは改変が困難になってしまう
開発したMotionソフトウェアは企業の資産として蓄積されることが理想ですが、モノやヒトに依存した形で蓄積されてしまうと、資産の有効活用が出来ず余計なコストが生じてしまうことになります。
※併せてこちらもご覧ください
TechFactory : 製造・検査設備の現場課題が、本来取組むべき企業の差別化戦略を阻害している
■
モノとヒトに依存しないMotionプラットフォーム CODESYS SoftMotion
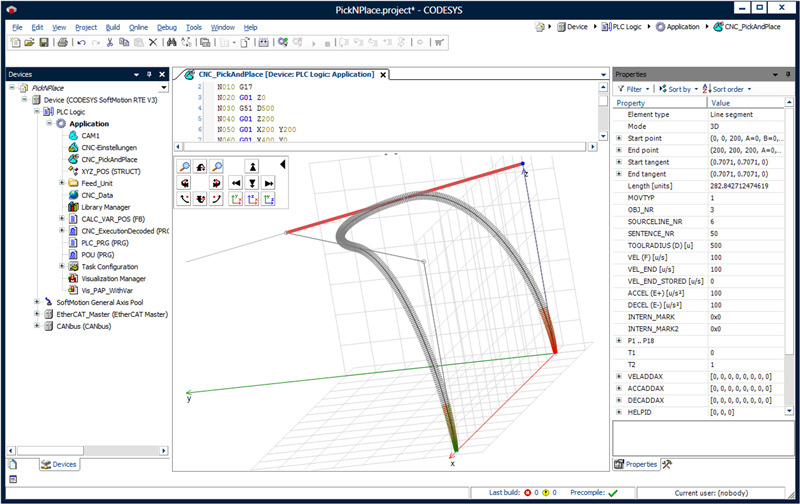
CODESYSはソフトPLC、Motion制御、HMI、フィールドバスといったあらゆる機能を統合したオートメーションプラットフォームおよびソフトウェア統合開発環境です。
今回はこの中のMotion制御の部分に注目してメリットをご紹介します。
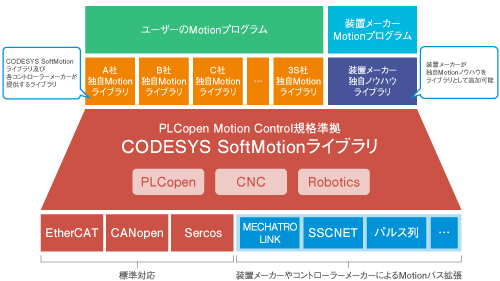
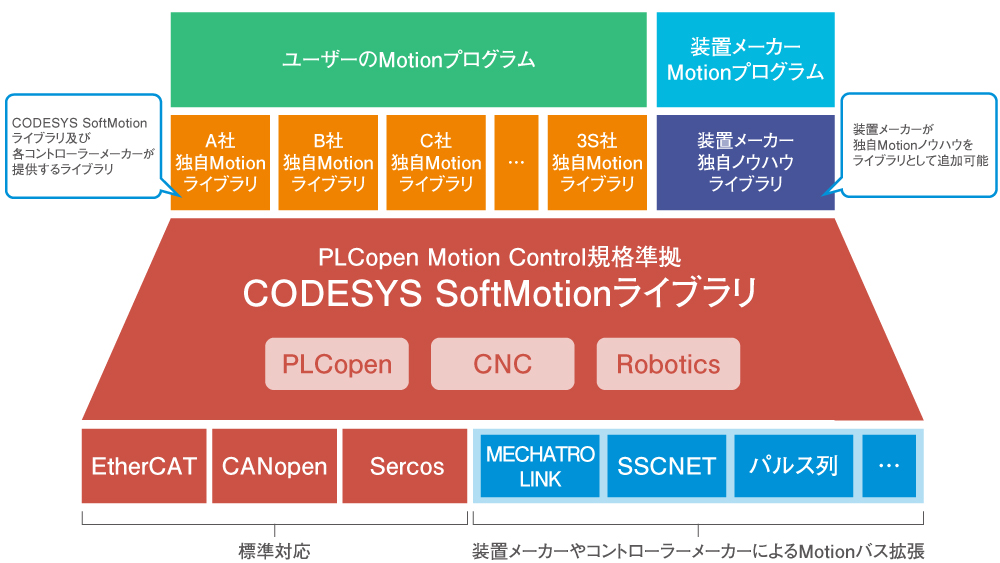
上図はCODESYS SoftMotionの構造を体系的に表しています。
最下層には様々なフィールドバスが展開されており、CODESYSが標準でサポートするMotionバスであるEtherCAT、CANopen、SercosⅢ以外にも、CODESYSを拡張開発することでその他のバスや装置メーカー固有の独自バスにも対応することが可能です。これにより様々なメーカーのモータードライブを利用することが可能です。
次に、中央に赤い大きなブロックがありますが、これがCODESYS SoftMotionの中核を成しているCODESYS SoftMotionライブラリです。このライブラリには標準規格PLCopen Motion Controlで定義されているファンクションブロックと3S社が独自に用意しているファンクションブロックが含まれています。
これらを利用してCODESYS上で作成したMotion制御アプリケーションは、単一のフィールドバスやドライブメーカーに依存せず動作することができます。また利用するフィールドバスやドライブが変わってもプログラム自体は書き換えることなく動作でき、ハードウェアに依存しないMotionアプリケーション作成が可能になります。
その一段上に行くと、オレンジ色のブロックがあります。
様々なコントローラーメーカーがCODESYS SoftMotionを搭載したコントローラーをリリースしており、多くの場合それらには簡単に高度なMotionを実現するための便利なライブラリが各コントローラーメーカーによって提供されています。
こういった機能群を利用することで、CODESYSユーザーは高度なMotionプログラムも比較的容易に実現でき、可読性が高く再利用しやすいアプリケーションが実現できます。
■
自社独自のMotion機能をCODESYS上で実現する
装置メーカーでは各社独自に装置性能を向上させ差別化を図るべく、独自にMotion機能を開発していることも少なくありません。こういった独自Motion機能もCODESYS上に移植することが可能です。これにより、ヒト・モノに依存しにくくなるというCODESYSのメリットを得ながら独自Motion技術の活用をすることも可能になります。
独自Motion技術をCODESYS上へ移植する方法は大きく2通りあります。いずれの場合でも用意されているフィールドバスなどを利用することが可能です。
・アルゴリズムをST言語などのIEC 61131-3に準拠した言語へ移植してファンクションブロック化する
・アルゴリズムはC言語で実装し、ST言語などから利用可能なファンクションブロック化する
|