| ■
No.1: 形状ベースパターンマッチングの基本性能のご紹介 |
|
今回はHALCONの形状ベースパターンマッチングの基本性能の中から、優れた機能の特徴である自動パラメータ決定機能と、対象物の遮蔽、スケーリングについてご紹介いたします。
|
|
■
自動パラメータ決定機能によるモデル登録
パターンマッチングを行うのは難しい、という印象を持ってしまいがちですが、HALCONでは登録と検索の2つの関数だけで実現できてしまいます。また、最新バージョンであるHALCON 7.1の新機能として、パラメータの自動決定機能が追加されました。この機能により、面倒なマッチングのパラメータ設定までもが必要なくなり、単純に2つの関数を実行するだけで最適なマッチングがおこなえるようになりました。マッチング用のパラメータを’auto’に設定することで、定義したモデル画像に対してHALCONが最適なパラメータを計算して設定を行います(図1)。
|
|
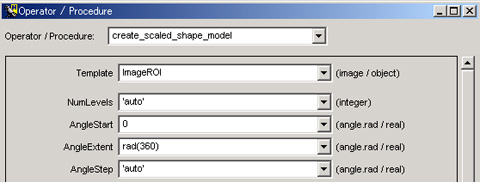
図1.
パラメータ設定例(上部抜粋)
|
|
■
遮蔽物に対するパターンマッチング
画像処理を行われる方の中には、対象物のハンドリングを目的として画像処理を利用される方もおられるかと思います。この場合、パターンマッチングは位置情報が得られるため、非常に有効な手法です。しかしながら、場合によっては、対象が重なりあったりすることもあり、従来のパターンマッチングでは扱いが難しい場合もあると思います。
HALCONに実装されている形状ベースパターンマッチングは画像の輪郭情報を元にマッチングを行っており、検索対象の形状が画像に現れているならば、遮蔽物があった場合でも対象を見つけることが可能です。たとえば、図2のような歯車とクリップが重なりあって、クリップの形状情報が一部失われている状態であっても、HALCONでは画像から得られる形状情報を元にしてマッチングを行うため、図3のように検出することが可能です。
|
|

図2.
遮蔽物画像
|

図3.
遮蔽物へのマッチング
|
|
■
回転、スケーリングを伴った高速マッチング
HALCONは回転、スケーリングを伴ったマッチングに対しても、高速に見つけることが可能です。 図4の画像を用いてモデルを登録し、マッチングを行った結果を図5に示します。図5の画像において検索対象はモデルと比べて傾き、サイズも異なるため、マッチングには回転およびスケーリングを考慮する必要があります。このような場合であっても高速に見つけてくることができます。
|
|

図4.
登録モデル
|
|
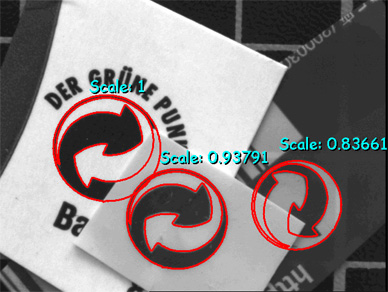
図5.
スケールと回転を考慮したマッチング結果(数値は登録モデルを1としたときのスケール)
|
|
今回ご紹介したものはHALCONのパターンマッチングに関する一部の情報になります。HALCONの優れた機能は実際に使用していただき、実感していただきたいと考えております。
次回のLinX Expressでは優れた機能を有するHALCONのパターンマッチングについて、最大限に機能を引き出す方法をご紹介します。
|


