|
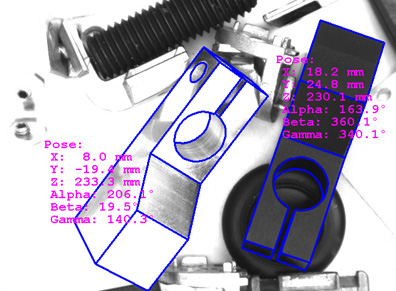
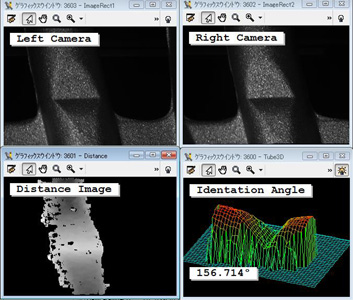
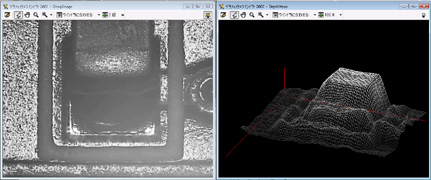
弊社株式会社リンクスは東京ビッグサイトにて開催される「2007国際ロボット展」に出展します。本展示会で行うワークショップ講演をご案内いたします。 今後マシンビジョンの進む方向性として、2次元の画像から3次元の情報を取得するテクノロジーが挙げられます。HALCONは従来から3次元処理に継続して開発投資を行っており、なかでも今年の7月にリリースされたHALCON 8.0では、2次元のパターンマッチング技術を3次元に応用した斬新的な手法がサポートされました。
本講演では、HALCONが提供する3次元機能に焦点を当てて、それらのテクノロジーを例題を含めてご紹介します。当日講演を予定している3次元処理機能についてのダイジェストを以下にご紹介します。是非とも当日ご参加いただければ幸いです。 |